

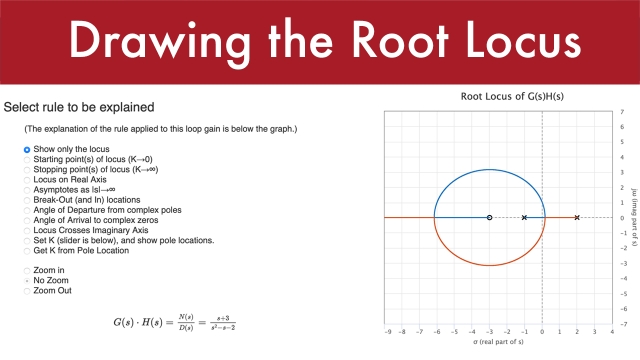
Drawing the root locus (Interactive Tool)
Beginner
App
Theory
This page was developed to help student learn how to sketch the root locus by hand. You can enter a numerator and denominator for G(s)H(s) (i.e., the loop gain) and the program will guide...
See More")
Control Bootcamp: Sensitivity and Complementary Sensitivity (Part 2)
8 min
Beginner
Video
Theory
Here we explore the sensitivity and complementary sensitivity functions, which are critical in understanding robustness and performance. (Part 2)
See More
Lecture 22: Frequency domain specifications for Second order system
39 min
Beginner
Video
Theory
Posicast Control 2 - ( In English )
5 min
Beginner
Video
Theory
This video is about the Half-Cycle Posicast. It includes some hints about how to simulate this type of control using Simulink
See More
Time Domain Analysis: Performance Metrics for a First Order System
78 min
Beginner
Video
Theory
In this video we introduce the concept of time domain analysis for dynamic systems. We examine a first order dynamic system and derive how various performan...
See More
Control Bootcamp: Laplace Transforms and the Transfer Function
19 min
Beginner
Video
Theory
Here we show how to compute the transfer function using the Laplace transform.
See More
Solving the 1D Wave Equation
118 min
Beginner
Video
Theory
In this video, we solve the 1D wave equation. We utilize the separation of variables method to solve this 2nd order, linear, homogeneous, partial differenti...
See More![Introduction to Deep Learning by Andrew NG [COMPLETE]](/sites/default/files/styles/search_resulkts/public/2022-01/intro_DL_0.jpg?itok=jS-vFChN)
Introduction to Deep Learning by Andrew NG [COMPLETE]
Beginner
Video
Theory
Andrew Ng's course on deep learning and neural networks.
See More![SVD: Image Compression [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_419.jpg?itok=wbEekwkx)
SVD: Image Compression [Matlab]
14 min
Beginner
Video
Application
This video describes how to use the singular value decomposition (SVD) for image compression in Matlab.
See More
Introduction to System Stability and Control
11 min
Beginner
Video
Theory
This video attempts to provide an intuitive understanding of concepts like stability and stability margin. I briefly describe both of these topics with examples and explain how you can...
See More
Frequency domain – tutorial 12: FT of periodic signals
10 min
Beginner
Video
Theory
In this video, we learn how to find the Fourier transform for periodic signals. The following materials are covered:1) relation between Fourier transform and...
See More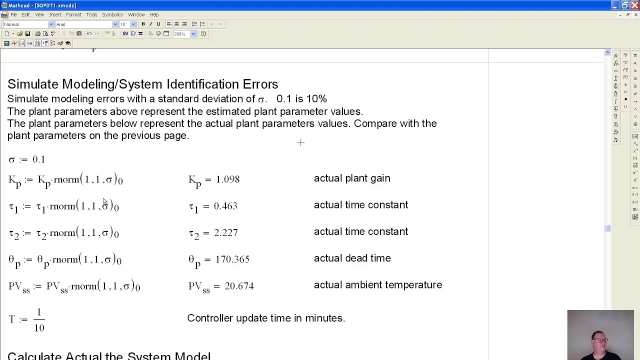
Peter Ponders PID. Second Order Plus Dead Time , SOPDT, Temperature Control,...
12 min
Beginner
Video
Theory
In this video I derive the equations for the controller gains and a low pass filter for a SOPDT system with a very long dead time To make the simulation mo...
See More![Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_304.jpg?itok=qj48C5IZ)
Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]
10 min
Beginner
Video
Theory
This lecture explains the equivalence of controllability, reachability, and the ability to arbitrarily place eigenvalues of the closed loop system.
See More
Routh Stability Criterion Intro and Example
13 min
Beginner
Video
Theory
I introduce and walk through an example problem of how we can use the Routh Stability Criterion to rigorously determine the necessary and sufficient conditio...
See More
Time domain - tutorial 6: elementary signals
11 min
Beginner
Video
Theory
In this video, we cover two elementary signals, unit step and unit impulse, which will be extensively used in this course. The following materials are covere...
See More
Peter Ponders PID - Tank Level Control
20 min
Beginner
Video
Theory
Discrete control #5: The bilinear transform
15 min
Beginner
Video
Theory
This is video number five on discrete control and here, we’re going to cover the famous and useful bilinear transform. The bilinear transform is yet another method for converting, or mapping...
See More
IMC Design of an Unstable Process Example
10 min
Beginner
Video
Theory
In this video, I cover how we can use IMC method to rigorously design a controller for an inherently unstable process (has a positive pole).
See More
Constraint Enforcement for Improved Safety | Learning-Based Control
14 min
Beginner
Video
Theory
Learn about the constraints of your system. Then see a how to enforce those constraints so the system does not violate them. Constraint enforcement is important for safety-critical...
See More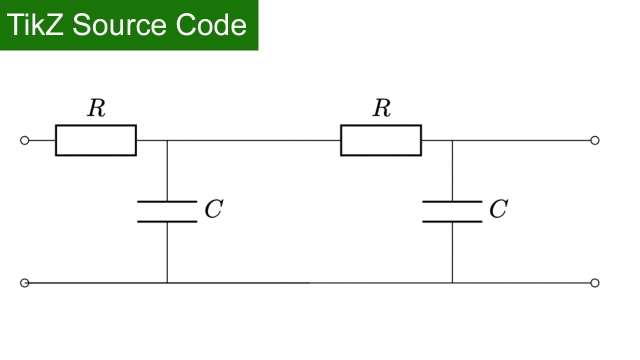
TikZ source Code: Two Interconnected RC Elements
Beginner
Source Code
Application
TikZ source Code for two Interconnected RC Elements.
See More
Final Value Theorem and Steady State Error
12 min
Beginner
Video
Theory
This Final Value Theorem is a way we can determine what value the time domain function approaches at infinity but from the S-domain transfer function. This is very helpful when we're trying...
See More
Relative Gain Array RGA and Input Output Pairing
12 min
Beginner
Video
Theory
The RGA is a tool used by process engineers to determine how to pair inputs and outputs during controller design to strive for better performance and robustn...
See More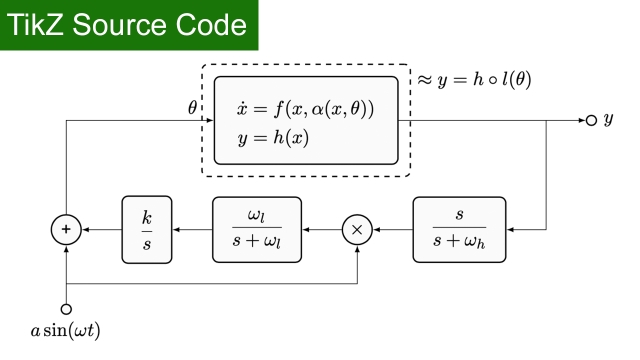
TikZ source Code: Extremum Seeking Control Block Diagram (Krstic)
Beginner
Source Code
Application
TikZ source Code: Extremum Seeking Control Block Diagram (Krstic)
See More")
The Fast Fourier Transform (FFT)
8 min
Beginner
Video
Application
Here I introduce the Fast Fourier Transform (FFT), which is how we compute the Fourier Transform on a computer. The FFT is one of the most important algorithms of all time.
See More
Homogeneous Linear Ordinary Differential Equations
74 min
Beginner
Video
Theory
In this video we discuss how to solve homogeneous linear ordinary differential equations (ODEs). The approach outlined in this lecture is applicable to high...
See More