

What Are Dynamic Models? Chapter 1 from Dynamic Models in Biology
Beginner
Book
Theory
Throughout this book we use a wide-ranging set of case studies to illustrate different aspects of models and modeling. In this introductory chapter we describe and give examples of different...
See More
System Identification Methods
17 min
Beginner
Video
Theory
System Identification is the process of determining the model or the equations of motion for your system. This is incredibly important because basing a control system design off of a bad...
See More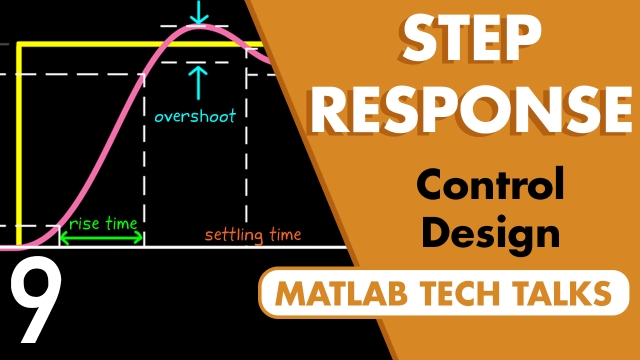
Control Systems in Practice, Part 9: The Step Response
15 min
Beginner
Video
Theory
This video covers a few interesting things about the step response. We’ll look at what a step response is and some of the ways it can be used to specify design requirements for closed loop...
See More
Understanding PID Control, Part 4: A PID Tuning Guide
12 min
Beginner
Video
Theory
It can be difficult to navigate all the resources that promise to explain the secrets of PID tuning. Some proclaim that PID tuning is an art that requires finesse and experience, while...
See More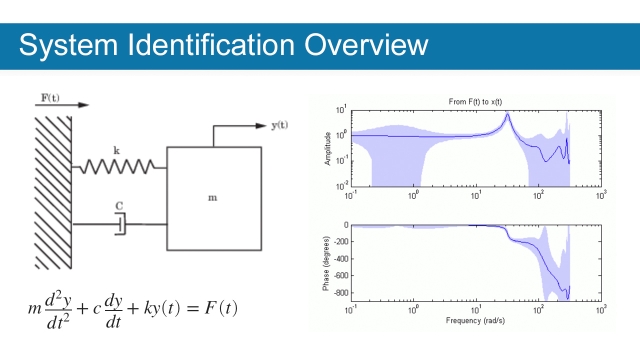
System Identification Overview
Beginner
Article / Blog
Theory
System identification is a methodology for building mathematical models of dynamic systems using measurements of the input and output signals of the system. This overview from Mathworks...
See More
Modeling Physical Systems, An Overview
7 min
Beginner
Video
Theory
This video sets the stage for the topics that I want to cover over the next month or two. This is an overview of how you go from a physical system to a linear model where you can design a...
See More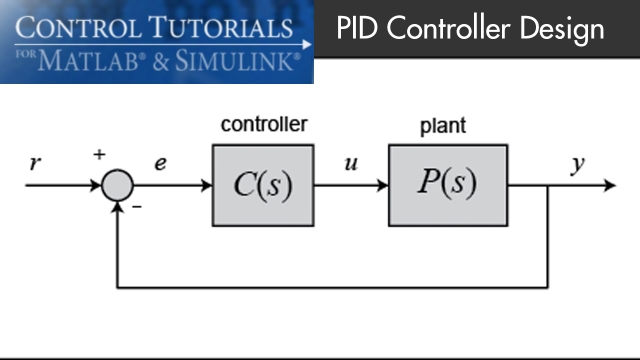
Introduction: PID Controller Design
30 min
Beginner
Article / Blog
Application
In this tutorial we will introduce a simple, yet versatile, feedback compensator structure: the Proportional-Integral-Derivative (PID) controller. The PID controller is widely employed...
See More
Autonomous Navigation, Part 4: Path Planning with A* and RRT
18 min
Beginner
Video
Theory
This video explores some of the ways that we can use a map like a binary occupancy grid for motion and path planning. We briefly cover what motion planning means and how we can use a graph...
See More
The AVA Flight Computer
18 min
Beginner
Video
Application
This video describes the board design, hardware architecture, and software components of the All Vehicle Avionics (AVA) flight computer that was designed by Joe Barnard of BPS Space. This...
See More
Model Predictive Control
12 min
Beginner
Video
Theory
This lecture provides an overview of model predictive control (MPC), which is one of the most powerful and general control frameworks. MPC is used extensively in industrial control settings...
See More
Improving the Beginner's PID - Introduction
30 min
Beginner
Article / Blog
Application
In conjunction with the release of the new Arduino PID Library Brett has released this series of posts that explain his PID code. He start's with what he call's “The Beginner’s PID.” He...
See More
Process Dynamics and Control Course
Beginner
Course
Theory
This course focuses on a complete start to finish process of physics-based modeling, data driven methods, and controller design. Although some knowledge of computer programming is required...
See More
Artificial Intelligence
6 min
Beginner
Video
Theory
This lecture discusses artificial intelligence (AI) in the context of data science and machine learning.
See More
But what is the Fourier Transform? A visual introduction.
20 min
Beginner
Video
Theory
An animated introduction to the Fourier Transform.
See More
Discrete control #4: Discretize with the matched method
14 min
Beginner
Video
Theory
This is the fourth video on discrete control and in this video we are going to continue exploring the different techniques we can use to discretize a continuous system and talk about the...
See More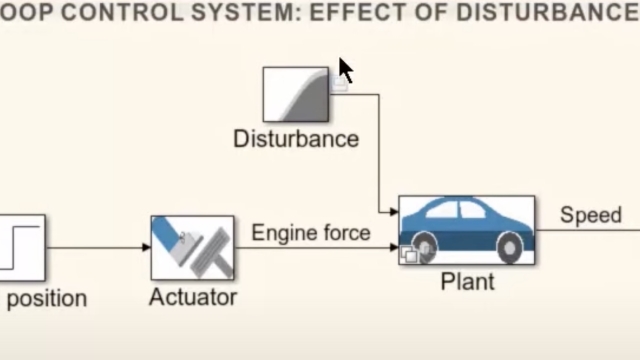
Understanding Control Systems: The Disturbance Rejection Problem
6 min
Beginner
Video
Demonstration
This video provides a demonstration using a car to show how you can simulate open- and closed-loop systems in Simulink®.
First, you will learn how to model and tune open-loop systems. The...
See More
Trimming and Linearization, Part 1: What is Linearization?
14 min
Beginner
Video
Theory
Why go through the trouble of linearizing a model? To paraphrase Richard Feynman, it’s because we know how to solve linear systems. With a linear model we can more easily design a controller...
See More
Nyquist Stability Criterion, Part 1
16 min
Beginner
Video
Theory
An explanation of the Nyquist Stability Criterion. This video steps through the importance of the criterion, how to interpret the Nyquist plot graphically, and why it is the way it is....
See More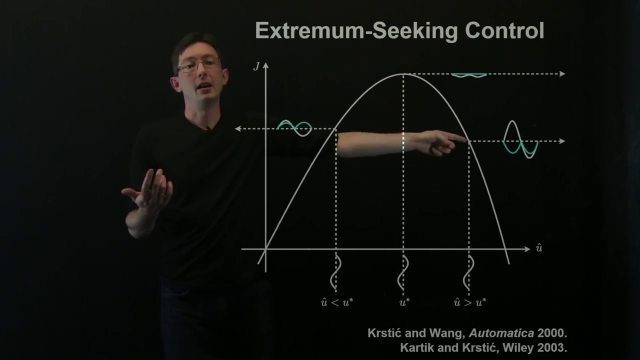
Extremum Seeking Control in Matlab
17 min
Beginner
Video
Application
This lecture explores extremum-seeking control (ESC) on a simple example in Matlab. In particular, a discrete-time (digital) version of ESC is coded in a Matlab script.
See More
A real control system - how to start designing
26 min
Beginner
Video
Application
Let’s design a control system the way you might approach it in a real situation rather than an academic one. In this video, I step through a control problem and show how control theory is...
See More
Control Bootcamp: Kalman Filter Example in Matlab
22 min
Beginner
Video
Application
This lecture explores the Kalman Filter in Matlab on an inverted pendulum on a cart.
See More
Machine Learning & Text Processing Lectures
Beginner
Video
Theory
This is the video lecture collection by Victor Lavrenko.
See More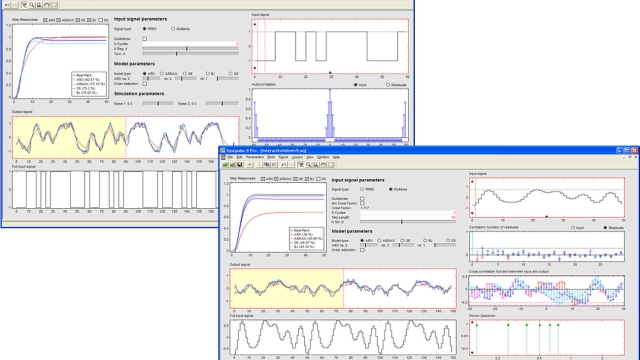
ITSIE: An Interactive Software Tool for System Identification Education
Beginner
App
Application
ITSIE is an Interactive Tool for System Identification Education. The tool is developed using Sysquake, a Matlab-like language with fast execution and excellent facilities for interactive...
See More
Control Systems in Practice, Part 4: Why Time Delay Matters
15 min
Beginner
Video
Theory
Time delays exist in two varieties: signal distorting delays, like phase lag, in which each frequency is delayed by a different amount of time, resulting in a distorted signal shape; and non...
See More
Linear Regression
10 min
Beginner
Video
Theory
Linear regression is a cornerstone of data-driven modeling; here we show how the SVD can be used for linear regression.
See More