


Machine Learning Control: Genetic Programming
12 min
Beginner
Video
Theory
This lecture explores the use of genetic programming to simultaneously optimize the structure and parameters of an effective control law.
See More
Finding Transfer Functions from Response Graphs
9 min
Beginner
Video
Theory
Given a system response to a unit step change, in this video I'll cover how we can derive the transfer function so we can predict how our system will respond...
See More
Time domain - tutorial 2: signal representation
2 min
Beginner
Video
Theory
In this video, we review how to represent information as a signal. The information can be anything such as voice (1D) or an image (2D) or even a video (3D). ...
See More
Lecture 5: Block Diagram Reduction
46 min
Beginner
Video
Theory

Understanding Model Predictive Control, Part 5: How To Run MPC Faster
7 min
Beginner
Video
Theory
This video starts by providing quick tips for implementing MPC for fast applications. If you need to further decrease the sample time for your fast applications, you can use explicit MPC...
See More
Second Order Dynamics Example
4 min
Beginner
Video
Theory
How will a second order process respond in the time domain when subjected to a unit step input? What other behaviors can we expect to see and why? Tune in to...
See More
Tutorial on Root Locus
56 min
Beginner
Video
Theory

Understanding PID Control, Part 2: Expanding Beyond a Simple Integral
10 min
Beginner
Video
Theory
The first video in this series described a PID controller, and it showed how each of the three branches help control your system.That seemed simple enough and appeared to work. However, in...
See More
The Taylor Series
84 min
Beginner
Video
Theory
In this video we discuss the Taylor Series (and the closely related Maclaurin Series). These are two specific types of Power Series that allow you to approx...
See More
dRehmFlight VTOL - Teensy (Arduino) Flight Controller and Stabilization
5 min
Beginner
Video
Application
dRehmFlight VTOL is a new flight controller and stabilization package intended to be used for small to medium sized hobby or research projects. dRehmFlight is the code, and the physical...
See More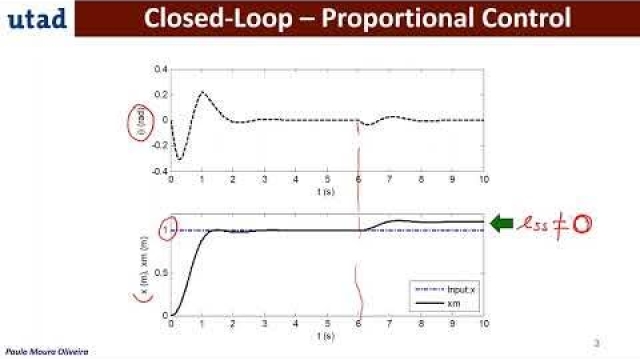
Posicast Control 5 - (In English)
7 min
Beginner
Video
Theory
In this video Posicast in closed-loop is illustrated using a gantry-crane system simulations.
See More")
Control Bootcamp: Sensitivity and Complementary Sensitivity (Part 2)
8 min
Beginner
Video
Theory
Here we explore the sensitivity and complementary sensitivity functions, which are critical in understanding robustness and performance. (Part 2)
See More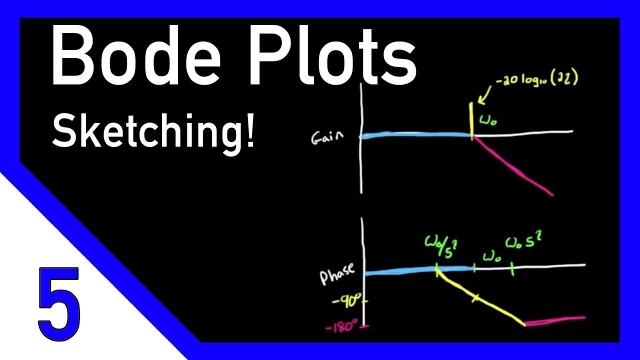
Bode Plots by Hand: Complex Poles or Zeros
11 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More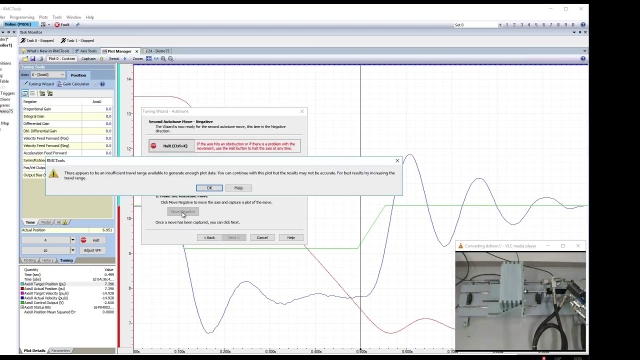
Peter Ponders PID, Natural Frequency vs Frequency of Acceleration
9 min
Beginner
Video
Theory
This video is intended for servo hydraulic system designers and those that program hydraulic servo systems but it does show how several of the techniques sho...
See More
Lecture 7: More on Signal Flow Graphs and Block Diagram Reduction
44 min
Beginner
Video
Theory

Peter Ponders PID - Observers/Estimators
26 min
Beginner
Video
Theory

Drone Simulation and Control, Part 2: How Do You Get a Drone to Hover?
13 min
Beginner
Video
Theory
In the last video, we showed we can manipulate the four motors of a quadcopter to maneuver it in 3D space by getting it to roll, pitch, yaw, and change its thrust. We also covered the four...
See More
Matrix Completion and the Netflix Prize
6 min
Beginner
Video
Theory
This video describes how the singular value decomposition (SVD) can be used for matrix completion and recommender systems.
See More
Standing Waves Demonstration
44 min
Beginner
Video
Theory
In this video we demonstrate standing waves. We show how the system can be excited by oscillating at specific frequencies to generating standing waves. The...
See More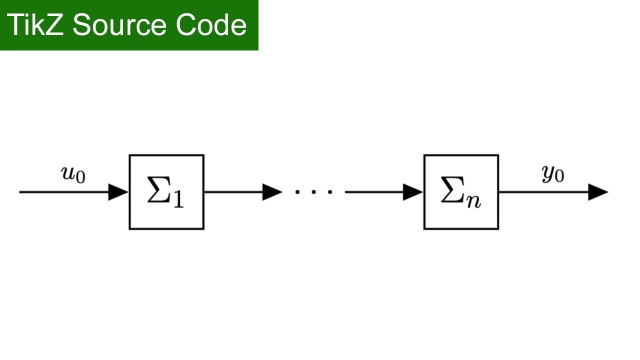
TikZ source Code: Cascade of several subsystems
Beginner
Source Code
Application
TikZ source Code: Cascade of several subsystems.
See More![Denoising Data with FFT [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_359.jpg?itok=UEtxZc00 "Denoising Data with FFT [Python]")
Denoising Data with FFT [Python]
10 min
Beginner
Video
Application
This video describes how to clean data with the Fast Fourier Transform (FFT) in Python.
See More
Control Bootcamp: Three Equivalent Representations of Linear Systems
12 min
Beginner
Video
Theory
This video explores three equivalent representations of linear systems: State-space ODEs, Frequency domain transfer functions, and Time-domain impulse response convolution.
See More
Laplace domain – tutorial 4: Laplace transform examples
20 min
Beginner
Video
Theory
In this video, we solve lots of examples to practice how to quickly find Laplace transform using the table of pairs & properties and five golden rules on ROC...
See More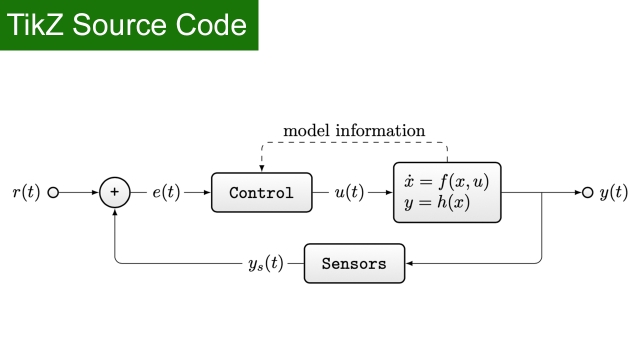
TikZ source Code: Feedback system
Beginner
Source Code
Application
TikZ source Code: Feedback system
See More
The Fourier Transform and Convolution Integrals
10 min
Beginner
Video
Theory
This video describes how the Fourier Transform maps the convolution integral of two functions to the product of their respective Fourier Transforms.
See More