

![Fourier Series and Gibbs Phenomena [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_363.jpg?itok=YEl5oqig "Fourier Series and Gibbs Phenomena [Matlab]")
Fourier Series and Gibbs Phenomena [Matlab]
7 min
Beginner
Video
Application
This video will describe how to compute the Fourier Series in Matlab and Gibbs Phenomena that appear for discontinuous functions.
See More
Lecture 10: Second Order Underdamped Systems: Unit step response and time do...
23 min
Beginner
Video
Theory

Lecture 30: Canonical Forms
40 min
Beginner
Video
Theory

Time Domain Analysis: Performance Metrics for a First Order System
78 min
Beginner
Video
Theory
In this video we introduce the concept of time domain analysis for dynamic systems. We examine a first order dynamic system and derive how various performan...
See More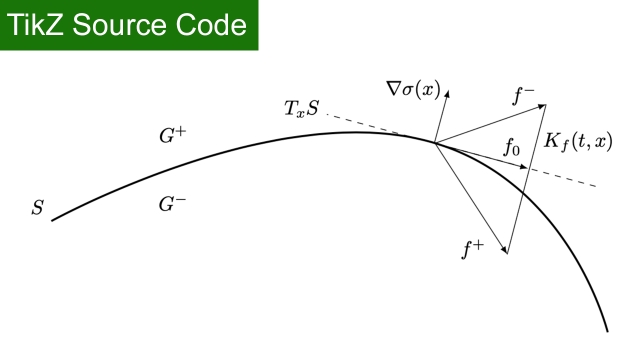
TikZ source Code: Switching Smooth Filippov
Beginner
Source Code
Application
TikZ source Code: Switching Smooth Filippov
See More
Lecture 24: Stability using Bode plots
46 min
Beginner
Video
Theory
![Cayley-Hamilton Theorem [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_395.jpg?itok=Xi08rPqq "Cayley-Hamilton Theorem [Control Bootcamp]")
Cayley-Hamilton Theorem [Control Bootcamp]
6 min
Beginner
Video
Theory
Here we describe the Cayley-Hamilton Theorem, which states that every square matrix satisfies its own characteristic equation. This is very useful to prove results related to...
See More
Solving the 1D Wave Equation
118 min
Beginner
Video
Theory
In this video, we solve the 1D wave equation. We utilize the separation of variables method to solve this 2nd order, linear, homogeneous, partial differenti...
See More
Lecture 27: Lead Compensator Design using Bode plots
70 min
Beginner
Video
Theory

Frequency domain – tutorial 12: FT of periodic signals
10 min
Beginner
Video
Theory
In this video, we learn how to find the Fourier transform for periodic signals. The following materials are covered:1) relation between Fourier transform and...
See More
Instrument Kit for ME 316
Beginner
Hardware
Application
This hardware kit accompanies the textbook "Project Based Engineering Instrumentation with CircultPython" by Dr. Carlos Montalvo. Using this hardware and the textbook you’ll build some...
See More
Time domain - tutorial 6: elementary signals
11 min
Beginner
Video
Theory
In this video, we cover two elementary signals, unit step and unit impulse, which will be extensively used in this course. The following materials are covere...
See More
Cascade Control Intro
8 min
Beginner
Video
Theory
How can we improve the disturbance rejection of our controllers using additional, relevant measurements? Tune in to find out!
See More
Understanding Model Predictive Control, Part 7: Adaptive MPC Design with Sim...
8 min
Beginner
Video
Theory
In this video, you will learn how to design an adaptive MPC controller for an autonomous steering vehicle system whose dynamics change with respect to the longitudinal velocity. After you...
See More
Constraint Enforcement for Improved Safety | Learning-Based Control
14 min
Beginner
Video
Theory
Learn about the constraints of your system. Then see a how to enforce those constraints so the system does not violate them. Constraint enforcement is important for safety-critical...
See More
Dynamic Modeling in Process Control
14 min
Beginner
Video
Theory
I'll show you how we can build the dynamic models necessary to derive process transfer functions as an introduction to process control.
See More
Apollo's Flight Computer: Epitome of Engineering
81 min
Beginner
Video
Demonstration
The Apollo missions' success can be vastly accredited to the success of building a robust, one-of-a-kind flight computer for its guidance, navigation and control. Follow this video to...
See More
Simple Examples of PID Control
13 min
Beginner
Video
Theory
In this video I continue the topic of PID control. We walk through a simple control system and visualize how each of the three paths, P, I, and D, all address specific problems that arise...
See More
Equations of Motion for a Planar Vehicle
43 min
Beginner
Video
Theory
In this video we outline equations of motion for a simple planar vehicle. This model is suitable for vehicles such as boats or hovercraft that that are rest...
See More
Why Learn Control Theory
5 min
Beginner
Video
Theory
In this video I present a few reasons why learning control theory is important and try to give some motivation to continue learning.
See More
Fuzzy Logic, Part 3: Design and Applications of a Fuzzy Logic Controller
17 min
Beginner
Video
Theory
This video walks you through the process of designing a fuzzy inference system that can balance a pole on a cart. You can design a fuzzy logic controller using just experience and intuition...
See More")
A Nonlinear, 6 DOF Dynamic Model of an Aircraft: the Research Civil Aircraft...
103 min
Beginner
Video
Theory
In this video we develop a dynamic model of an aircraft by describing forces and moments generated by aerodynamic, propulsion, and gravity that act on the ai...
See More
Peter Ponders PID - Cascade Control Part2
14 min
Beginner
Video
Theory
The inner loop pole locations and gains are calculated first so the inner loop pole locations are determined by the user. The outer loop poles are still pla...
See More
Discrete control #1: Introduction and overview
22 min
Beginner
Video
Theory
So far I have only addressed designing control systems using the frequency domain, and only with continuous systems. That is, we’ve been working in the S domain with transfer functions. We...
See More
Routh-Hurwitz Criterion, Beyond Stability
11 min
Beginner
Video
Theory
This video explains of few uses of the Routh-Hurwitz Criterion that go beyond simply determining how many poles exist in the right half plane. I cover how to determine gain margin and how...
See More