

![Motivation for Full-State Estimation [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_378.jpg?itok=AFDlS2AH "Motivation for Full-State Estimation [Control Bootcamp]")
Motivation for Full-State Estimation [Control Bootcamp]
11 min
Beginner
Video
Theory
This video discusses the need for full-state estimation. In particular, if we want to use full-state feedback (e.g., LQR), but only have limited measurements of the system, it is necessary...
See More control")
Control Bootcamp: Cruise Control Example with Proportional-Integral (PI) co...
23 min
Beginner
Video
Theory
In this video, we show that introducing integral control reduces the steady-state tracking error to zero in the cruise control example. We also use a more sophisticated model for the...
See More
Lecture 2: LTI Systems, Laplace Transform Review and Transfer Function
38 min
Beginner
Video
Theory

The Root Locus Method - Introduction
13 min
Beginner
Video
Theory
This Root Locus method is a fantastic way of visualizing how the poles of a system move through the S-plane when a single system parameter is varied from 0 to infinity. I show how to...
See More
Trimming a Simulink Model Using the Linear Analysis Tool
68 min
Beginner
Video
Application
In this video we show how to use the Linear Analysis Tool to trim a non-linear Simulink model. This is also known as finding an operating point or an equili...
See More
Lecture 7: More on Signal Flow Graphs and Block Diagram Reduction
44 min
Beginner
Video
Theory

Practical Implementation Issues with a Full State Feedback Controller
63 min
Beginner
Video
Theory
In this video we investigate practical implementation issues that may arise when attempting to use a full state feedback controller on a real system. We ill...
See More
Matrix Completion and the Netflix Prize
6 min
Beginner
Video
Theory
This video describes how the singular value decomposition (SVD) can be used for matrix completion and recommender systems.
See More
Time domain - tutorial 7: system properties
22 min
Beginner
Video
Theory
In this video, we cover system properties. The concept of memoryless, causal, stable, invertible, time-invariant and linear systems is intuitively explained...
See More
Peter Ponders PID - Simulation Methods, Which is Best?
22 min
Beginner
Video
Theory
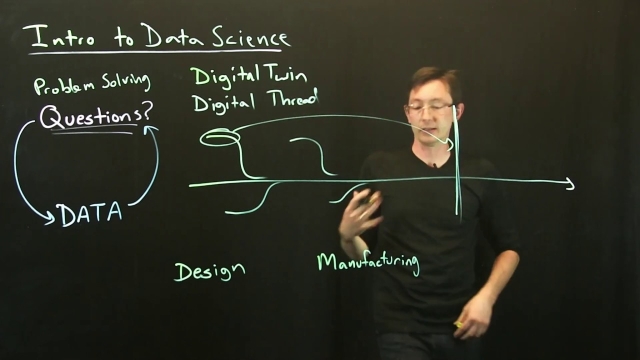
Digital Twins
8 min
Beginner
Video
Theory
This lecture discusses the use of data-driven digital twins in advanced model-based design and engineering, and the related digital thread, which ties together the data throughout an entire...
See More
Control Bootcamp: Three Equivalent Representations of Linear Systems
12 min
Beginner
Video
Theory
This video explores three equivalent representations of linear systems: State-space ODEs, Frequency domain transfer functions, and Time-domain impulse response convolution.
See More
Time domain - tutorial 10: interconnection of LTI systems
7 min
Beginner
Video
Theory
In this video, we learn how to connect LTI systems to make a bigger system. The learning objectives are to:1) get familiar with parallel and series intercon...
See More
Peter Ponders PID - System Identification Basics
11 min
Beginner
Video
Theory
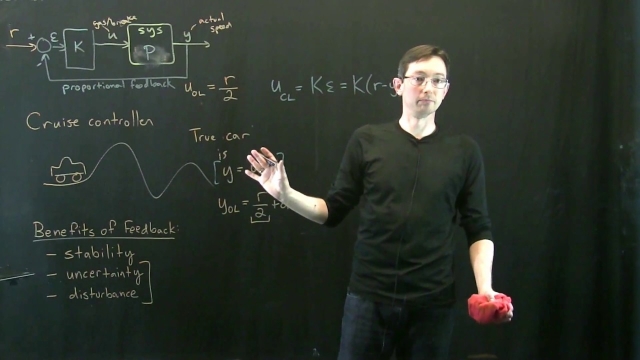
Control Bootcamp: Benefits of Feedback on Cruise Control Example
14 min
Beginner
Video
Theory
Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise control example.
See More
Machine Learning Goals
7 min
Beginner
Video
Theory
This lecture discusses the high-level goals of machine learning, and what we want out of our models. Goals include speed and accuracy, along with interpretability, generalizability...
See More
Closed Loop Feedback Control
13 min
Beginner
Video
Theory
Intro to closed loop (feedback) control motivation, theory, block diagrams and block diagram algebra, and PID controllers
See More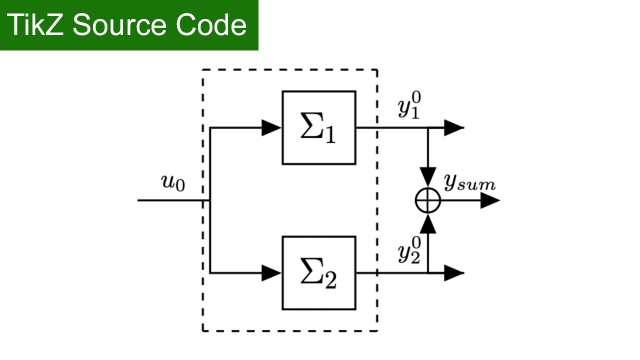

Fourier Series: Part 2
6 min
Beginner
Video
Theory
This video will show how to approximate a function with a Fourier series, which is an infinite sum of sines and cosines. We will discuss how these sines and cosines form a basis for the...
See More
Neural Networks and Deep Learning
7 min
Beginner
Video
Theory
This lecture explores the recent explosion of interest in neural networks and deep learning in the context of 1) vast and increasing data sets, and 2) rapidly improving computational...
See More
Bode Plot Gain and Phase Margin Determination
5 min
Beginner
Video
Theory
I'll show you how we can determine the Gain and Phase Margin from a Bode Plot (at some fixed controller gain).
See More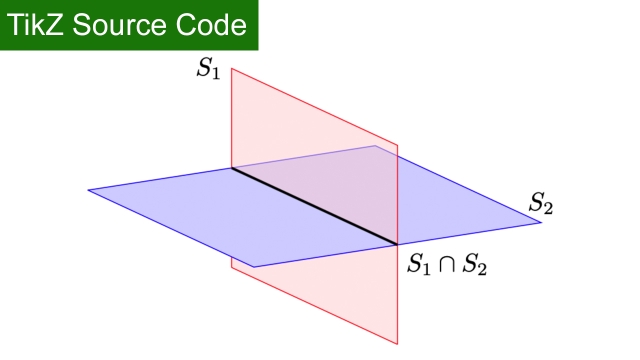
TikZ source Code: Switching Manifold
Beginner
Source Code
Application
TikZ source Code: Switching Manifold
See More
Lecture 11: Transient Response and Numerical Problems
30 min
Beginner
Video
Theory

Understanding PID Control, Part 2: Expanding Beyond a Simple Integral
10 min
Beginner
Video
Theory
The first video in this series described a PID controller, and it showed how each of the three branches help control your system.That seemed simple enough and appeared to work. However, in...
See More
The Taylor Series
84 min
Beginner
Video
Theory
In this video we discuss the Taylor Series (and the closely related Maclaurin Series). These are two specific types of Power Series that allow you to approx...
See More