


Using ‘minreal’ in Matlab to Perform Transfer Function Pole/Zero Cancellatio...
18 min
Beginner
Video
Application
In this tutorial we look at using the ‘minreal’ function in Matlab to perform pole/zero cancellation from transfer functions.Topics and time stamps:(0:10) – ...
See More
Peter Ponders PID - Root Locus Is Useless
25 min
Beginner
Video
Theory

Control Systems Lectures - Transfer Functions
11 min
Beginner
Video
Theory
This lecture describes transfer functions and how they are used to simplify modeling of dynamic systems.
See More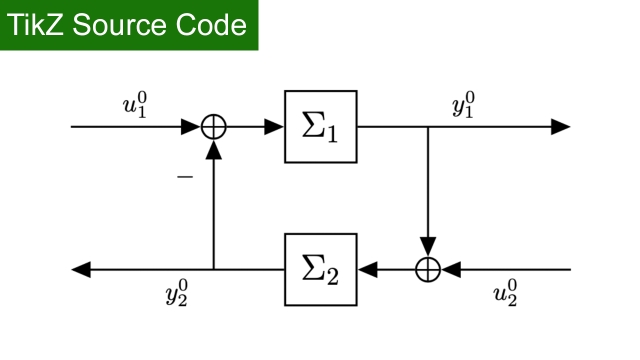
TikZ source Code: Two systems in negative feedback
Beginner
Source Code
Application
TikZ source Code: Two systems in negative feedback
See More
Fourier Series: Part 1
12 min
Beginner
Video
Theory
This video will show how to approximate a function with a Fourier series, which is an infinite sum of sines and cosines. We will discuss how these sines and cosines form a basis for the...
See More
Lecture 25: Nyquist stability criterion
48 min
Beginner
Video
Theory

Resonant Frequency of a Dynamic System
29 min
Beginner
Video
Theory
In this video we discuss the resonant frequency of a dynamic system. We show how the resonant frequency, natural frequency, and damped natural frequency are...
See More
Designing a Lag Compensator with Bode Plot
13 min
Beginner
Video
Theory
This video walks through a phase lag compensator example using the Bode Plot method.
See More
Lecture 5: Block Diagram Reduction
46 min
Beginner
Video
Theory

Solving the 1D Heat Equation
47 min
Beginner
Video
Theory
In this video we simplify the general heat equation to look at only a single spatial variable, thereby obtaining the 1D heat equation. We solving the result...
See More![SVD: Importance of Alignment [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_421.jpg?itok=xDlrjOXt)
SVD: Importance of Alignment [Matlab]
6 min
Beginner
Video
Application
This video describes the importance of aligning data when using the singular value decomposition (SVD) (Matlab code).
See More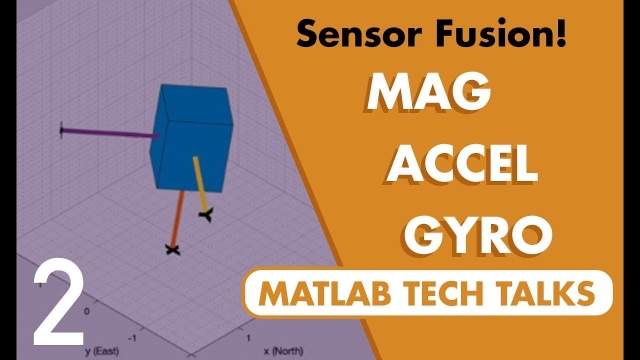
Understanding Sensor Fusion and Tracking, Part 2: Fusing a Mag, Accel, and G...
16 min
Beginner
Video
Theory
This video describes how we can use a magnetometer, accelerometer, and a gyro to estimate an object’s orientation. The goal is to show how these sensors contribute to the solution, and to...
See More
Lecture 3: Electrical and Mechanical System Transfer Functions
52 min
Beginner
Video
Theory

Time domain - tutorial 11: system properties from impulse response
13 min
Beginner
Video
Theory
In this video, we learn how to find system properties from the impulse response. Specifically, memoryless, causal, stable and invertible systems will be ful...
See More
Control Bootcamp: Loop shaping
7 min
Beginner
Video
Theory
This video explores shaping the loop transfer function to have desirable sensitivity and complementary sensitivity.
See More
Why Transfer Functions Matter
5 min
Beginner
Video
Theory
Once we know a process's transfer function we can model how it will respond to an variety of inputs very easily, check it out.
See More
Time domain - tutorial 2: signal representation
2 min
Beginner
Video
Theory
In this video, we review how to represent information as a signal. The information can be anything such as voice (1D) or an image (2D) or even a video (3D). ...
See More
Feedforward Control Introduction
6 min
Beginner
Video
Theory
I introduce feedforward control (FFC) and describe how it can be used to minimize the difference between an output's setpoint and measured value (the error o...
See More
Control Bootcamp: Observability
8 min
Beginner
Video
Theory
This video explores the observability of a linear system, namely the ability to estimate the full state "x(t)" from a time-history of limited output measurements "y(t)".
See More
Frequency Response Analysis FRA and the Amplitude Ratio and Phase Angle
12 min
Beginner
Video
Theory
Process engineers model output response to inputs that oscillate via frequency response analysis (FRA). In this video, I'll go over amplitude ratios and phas...
See More
Introductory course on aerial robotics, University of Pennsylvania
Beginner
Video
Theory
This course exposes you to the mechanics, design, control, and planning of robotic flight in 3 dimensional environments for micro-aerial vehicles, with an emphasis on quadrotors.
See More
Numerically Calculating Partial Derivatives
59 min
Beginner
Video
Theory
In this video we discuss how to calculate partial derivatives of a function using numerical techniques. In other words, these partials are calculated withou...
See More![Controllability and the Discrete-Time Impulse Response [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_302.jpg?itok=xjXmM9_U)
Controllability and the Discrete-Time Impulse Response [Control Bootcamp]
5 min
Beginner
Video
Theory
This lecture derives the impulse response for a discrete-time system and relates this to the controllability matrix.
See More
The Inverse Laplace Transform
48 min
Beginner
Video
Theory
In this video we show how to perform the inverse Laplace transform on a signal in the Laplace domain to obtain its equivalent representation in the time doma...
See More
Peter Ponders PID - Feed Forward Theory and Calculations
6 min
Beginner
Video
Theory