

TikZ source Code: Sliding Mode Control Example System 2
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 2
See More")
Control Bootcamp: Linear Quadratic Gaussian (LQG)
8 min
Beginner
Video
Theory
This lecture combines the optimal full-state feedback (e.g., LQR) with the optimal full-state estimator (e.g., LQE or Kalman Filter) to obtain the sensor-based linear quadratic Gaussian (LQG...
See More
An efficient orientation filter for inertial and inertial/magnetic sensor ar...
40 min
Advanced
Peer Reviewed Paper
Theory
This report presents a novel orientation filter applicable to IMUs consisting of tri-axis gyroscopes and accelerometers, and MARG sensor arrays that also include tri-axis magnetometers. The...
See More")
Frequency domain – tutorial 1: concept of frequency (with Chinese subtitle)
9 min
Beginner
Video
Theory
In this video, the following materials are covered:1) intuitive explanation on the frequency concept 2) what is the relation between time and frequency domai...
See More
Lecture 16: More on Root Locus and Gain Compensation
43 min
Beginner
Video
Theory

Machine Learning Control: Genetic Algorithms
13 min
Beginner
Video
Theory
This lecture provides an overview of genetic algorithms, which can be used to tune the parameters of a control law.
See More
Relative Gain Array RGA Analysis
6 min
Beginner
Video
Theory
I cover how you can find the relative gain array from the steady state gain array, and interpret the results to determine which input to pair with which outp...
See More
Frequency domain – tutorial 5: Fourier transform
9 min
Beginner
Video
Theory
In this video, we learn about Fourier transform which enables us to travel from time to frequency domain when a signal is not periodic. The learning objectiv...
See More
Understanding Model Predictive Control, Part 4: Adaptive, Gain-Scheduled and...
6 min
Beginner
Video
Theory
This video explains the type of MPC controller you can use based on your plant model, constraints, and cost function. An optimization problem with these properties is a convex one, and you...
See More
State Space in Process Control
10 min
Beginner
Video
Theory
An overview on how we can derive a state space model from a given set of state variables and inputs, as well as an intro to deviation variables. This is part...
See More
Data Preprocessing and the Short-Time Fourier Transform | Deep Learning for ...
16 min
Beginner
Video
Theory
Data in its raw form might not be ideal for training a network. There are some changes we can make to the data that are often desired or sometimes necessary in order to make training faster...
See More
Lectures on Adaptive Control and Learning by Tansel Yucelen
Beginner
Video
Theory
A serie of lectures on the topic of adaptive controllers.
See More
CORRECTION: Bode Plots by Hand: Complex Poles or Zeros
10 min
Beginner
Video
Theory
I explain how to determine the straight-line estimate of the Bode Plot for a second order transfer function with a pair of complex poles. This video is a repeat of the last half of the Bode...
See More
Sketching Root Locus Part 2
16 min
Beginner
Video
Theory
This is the second part of how to sketch a root locus by hand. However instead of following the normal rules for sketching a locus that you'd see in a book, I decided to explain the rules...
See More
Linearizing a Simulink Model Using the Linear Analysis Tool and ‘linmod’
55 min
Beginner
Video
Application
In this video we show how to linearize a non-linear Simulink model using numerical techniques. This approach is extremely powerful as it allows automatic ge...
See More
Peter Ponders PID - InputShaping
21 min
Beginner
Video
Theory

Peter Ponders PID - Root Locus Is Useless
25 min
Beginner
Video
Theory
Control Systems Lectures - Closed Loop Control
9 min
Beginner
Video
Theory
This lecture discusses the differences between open loop and closed loop control.
See More
Lecture 1 Introduction to Automatic Control
29 min
Beginner
Video
Theory

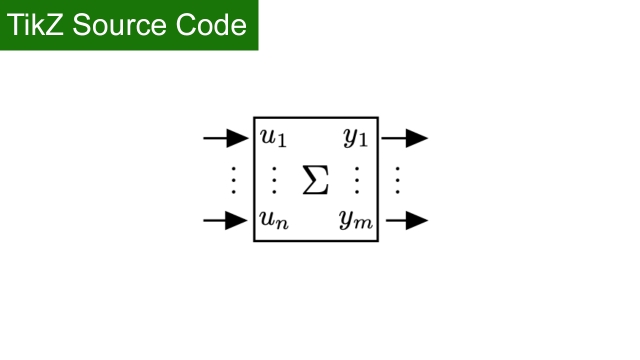
TikZ source Code: A single MIMO system
Beginner
Source Code
Application
TikZ source Code: A single MIMO system
See More
Solving the Heat Equation with the Fourier Transform
11 min
Beginner
Video
Theory
This video describes how the Fourier Transform can be used to solve the heat equation. In fact, the Fourier transform is a change of coordinates into the eigenvector coordinates for the...
See More
Linear Systems of Equations, Least Squares Regression, Pseudoinverse
11 min
Beginner
Video
Theory
This video describes how the SVD can be used to solve linear systems of equations. In particular, it is possible to solve nonsquare systems (overdetermined or underdetermined) via least...
See More
Derivation of the 1D Wave Equation
26 min
Beginner
Video
Theory
In this video, we derive the 1D wave equation. This partial differential equation (PDE) applies to scenarios such as the vibrations of a continuous string. ...
See More
Lecture 5: Block Diagram Reduction
46 min
Beginner
Video
Theory