


Control Bootcamp: Laplace Transforms and the Transfer Function
19 min
Beginner
Video
Theory
Here we show how to compute the transfer function using the Laplace transform.
See More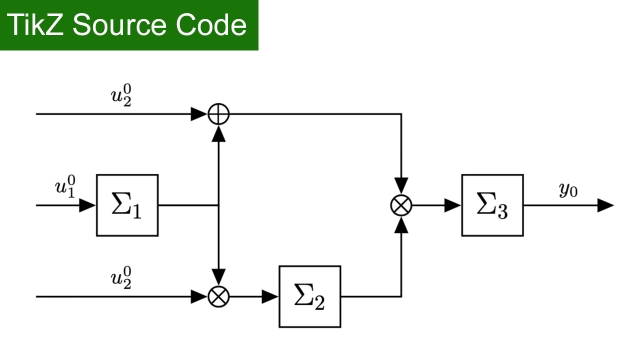
TikZ source Code: Multiplication of system variables
Beginner
Source Code
Application
TikZ source Code: Multiplication of system variables
See More
Derivation of the 2D Wave Equation
27 min
Beginner
Video
Theory
In this video we derive the 2D wave equation. This partial differential equation governs the motion of waves in a plane and is applicable for thin vibrating...
See More![Fourier Series and Gibbs Phenomena [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_364.jpg?itok=-v1tvO0q "Fourier Series and Gibbs Phenomena [Python]")
Fourier Series and Gibbs Phenomena [Python]
8 min
Beginner
Video
Application
This video will describe how to compute the Fourier Series in Python and Gibbs Phenomena that appear for discontinuous functions.
See More![SVD: Image Compression [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_419.jpg?itok=wbEekwkx)
SVD: Image Compression [Matlab]
14 min
Beginner
Video
Application
This video describes how to use the singular value decomposition (SVD) for image compression in Matlab.
See More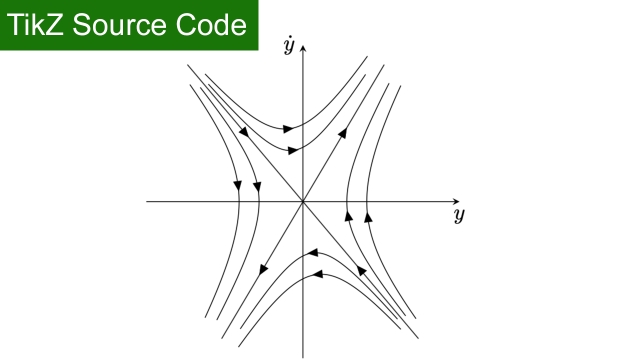
TikZ source Code: Sliding Mode Control Example System 1
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 1
See More
Frequency domain – tutorial 6: Fourier transform tables
34 min
Beginner
Video
Theory
In this video, we learn about Fourier transform tables which enable us to quickly travel from time to the frequency domain. The main learning objective is to...
See More
Routh Stability Criterion Intro and Example
13 min
Beginner
Video
Theory
I introduce and walk through an example problem of how we can use the Routh Stability Criterion to rigorously determine the necessary and sufficient conditio...
See More")
Course Introduction (Signal Processing 101)
2 min
Beginner
Video
Theory
Learn Signal Processing 101 in 31 lectures covering time, frequency and Laplace domain in about 8 hours all together:https://www.youtube.com/watch?v=KZd68xga...
See More
Control Systems with MATLAB - Root Locus
31 min
Beginner
Video
Theory

IMC Design of an Unstable Process Example
10 min
Beginner
Video
Theory
In this video, I cover how we can use IMC method to rigorously design a controller for an inherently unstable process (has a positive pole).
See More
Relative Gain Array RGA and Input Output Pairing
12 min
Beginner
Video
Theory
The RGA is a tool used by process engineers to determine how to pair inputs and outputs during controller design to strive for better performance and robustn...
See More
Homogeneous Linear Ordinary Differential Equations
74 min
Beginner
Video
Theory
In this video we discuss how to solve homogeneous linear ordinary differential equations (ODEs). The approach outlined in this lecture is applicable to high...
See More
Machine Learning Course by Andrew Ng
1120 min
Beginner
Course
Application
A very comprehensive and detailed course in machine learning , best suited for beginners with knowledge of high school linear mathematics.
See More
Cartesian, Polar, Cylindrical, and Spherical Coordinates
54 min
Beginner
Video
Theory
In this video we discuss Cartesian, Polar, Cylindrical, and Spherical coordinates as well as develop forward and reverse transformations to go from one coord...
See More
Understanding Sensor Fusion and Tracking, Part 3: Fusing a GPS and IMU to Es...
14 min
Beginner
Video
Theory
This video continues our discussion on using sensor fusion for positioning and localization by showing how we can use a GPS and an IMU to estimate and object’s orientation and position. We...
See More
Understanding and Sketching the Root Locus
176 min
Beginner
Video
Theory
In this video we discuss how to sketch the root locus for a system by developing a series of 5 core rules augmented by 5 supplemental rules (for a total of 1...
See More
Peter Ponders PID - IAE,ITAE,ISE Performance indicators
17 min
Beginner
Video
Theory
Performance indicators can be used to compute closed loop pole locations. Only one gain parameter is required to move the pole locations closer to the origi...
See More
Lecture 20: PID and Lag-Lead Compensator Design using Root Locus
74 min
Beginner
Video
Theory

Final Value Theorem
33 min
Beginner
Video
Theory
In this video we discuss the Final Value Theorem. Given a signal in the Laplace domain, this allows us to predict the steady state value of the signal in th...
See More
Designing a Lead Compensator with Root Locus
13 min
Beginner
Video
Theory
This video walks through a phase lead compensator example using the Root Locus method.
See More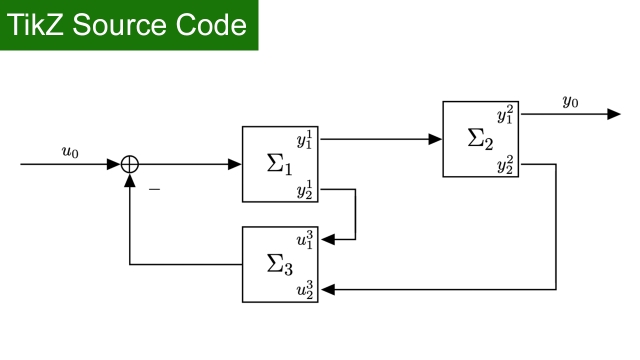
TikZ source Code: Interconnected MIMO Subsystems
Beginner
Source Code
Application
TikZ source Code: Interconnected MIMO Subsystems with different input and output dimensions
See More
Heat Transfer Demonstration
63 min
Beginner
Video
Theory
In this video we demonstrate heat transfer through a metal bar. By heating one side of the bar we can impose a non-uniform temperature distribution across t...
See More")
Introduction to the Fourier Transform (Part 2)
12 min
Beginner
Video
Theory
This video is the second part of the introduction to the Fourier Transform. I address an error that I made in the first video concerning the scaling term of the transform. I also try to...
See More")
Control Bootcamp: Linear Quadratic Gaussian (LQG)
8 min
Beginner
Video
Theory
This lecture combines the optimal full-state feedback (e.g., LQR) with the optimal full-state estimator (e.g., LQE or Kalman Filter) to obtain the sensor-based linear quadratic Gaussian (LQG...
See More