
Disturbances is one of the most important aspect of control problems. Without disturbances, process uncertainty, or unstable dynamics there would not be any need for feedback. Load disturbances are disturbances that enter the control loop somewhere in the process and drive the system away from its desired operating point. Load disturbances typically have low frequency and efficient reduction of load disturbances is a key issue in process control systems. Traditionally, disturbances have mostly been considered indirectly, e.g., by introducing integral action in the feedback controller. Feedforward control from measurable disturbances provides a possibility to make control actions before any disturbance response has occurred in the process output.
In fact, feedforward control can be considered as the most well-known control approach to deal with measurable disturbances. It started to be used almost 100 years ago, and since then it is being used in most industrial processes. It is a very simple technique that has been used typically as a complement to PID control, although it can be combined with any feedback controller. The feedforward control design has traditionally been performed assuming perfect cancellation of the disturbance signal, and when this solution was not possible because of non-realizable problems, static design solutions were usually implemented. In the last decade, this issue has been researched and analyzed, and new designs for feedforward control have appeared to face these problems. As a result, a set of new simple tuning rules have been obtained providing considerable improvements in the control system performance. This journey deals with the motivation of this issue and tries to highlight the advantages of this control approach presenting a novel set of tuning rules.
Moreover, a virtual lab is provided to be used as practical resource to test the proposed tuning rules. Finally, an example of experimental evaluation of these tuning rules is presented for the greenhouse temperature control problem.
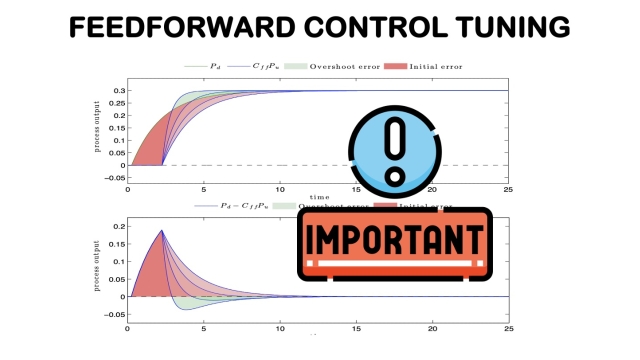
This resource provides a talk to motivate the need of tuning feedforward compensators. First, the inversion problems typically found when a feedforward compensator is implemented are introduced. The talk is mainly focused on the delay inversion problem, which is the most common one found in practice. This video is linked with the slides showed in the resource number 3 of this journey.
Advances in feedforward control for measurable disturbances
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See MoreEste video una charla sobre la necesidad de sintonizar los controladores por adelanto cuando se observan problemas de inversión. Se basa principalmente en los problemas de inversión de retardos, que son los más típicos en la práctica. Además, algunas métricas para cuantificar la contribución de los compensadores por adelanto son descritos. Las ideas planteadas en este vídeo pueden consultarse en el artículo presentado en el recurso número 4 de este "journey".

Advances in feedforward control for measurable disturbances (in Spanish)
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See MoreThese are the slides used in the talk presented in the previous resource, which tries to motivate the problem of feedforward control when inversion problem arise and thus the feedforward compensator is not realizable. In them, new tuning rules are summarized and presented by using simulated examples. More information about these tuning rules can be found in the article presented in the next item of the journey.
Advances in Feedforward Control for Measurable Disturbances (slides)
These slides present several contributions to improve the feedforward control approaches when inversion problem arise: the ideal compensator may not be realizable due to negative delay...
See MoreThis manuscript summaries the history of feedforward control for measurable disturbances, the drawbacks for feedforward control, and a summary of novel tuning rules to improve the control system performance when the inversion problems arise in the feedforward controller design. Simulations and comparisons are also included.
Feedforward tuning rules for measurable disturbances with PID control: a tut...
Feedforward control can be considered as the most well-known control approach to deal with measurable disturbances. It started to be used almost 100 years ago, and since then it is being...
See MoreThis resource provides a virtual labs for a two-tanks system can be used to practice in the feedforward control design. Perfect cancellation can be achieved in the system by default. However, a virtual delay can be added in the feedback loop to provoke delay inversion problems and thus being useful to study some of the tuning rules presented in this journey.
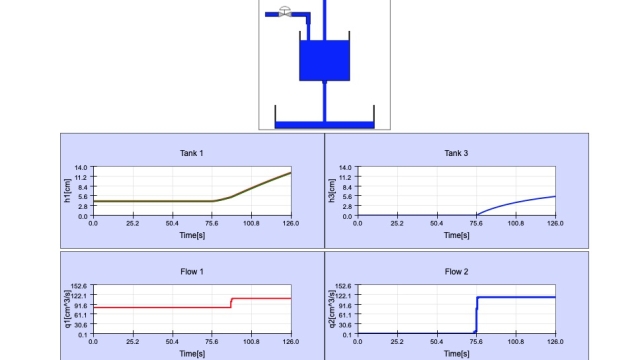
Virtual Lab for a Two-tanks system
This is a virtual lab for a two-tank system that can be used for modelling and control learing/teaching purposes. Open-loop tests and closed-loop simulatons based on PI control or PI plus...
See MoreThis manuscript presents a practical evaluation for some of the tuning rules discussed along this journey. A traditional greenhouse in Almeria (Spain) was selected as a test bed for an experimental evaluation of the feedforward controllers in the context of a challenging control problem with significant disturbances.

Experimental evaluation of feedforward tuning rules
This paper presents a practical comparison for some of the most relevant tuning rules for feedforward compensators that have been published in the recent years. The work is focused on the...
See More