
These are the resources that are referenced throughout the MATLAB Tech Talk video I made called "Online and Recursive System Identification | System Identification, Part 4"
Here is the MATLAB Tech Talk video on online system identification. If you've already seen the video and are just looking for the references that I used to make it then keep on scrolling!
Online and Recursive System Identification | System Identification, Part 4
Online system identification algorithms estimate the parameters and states of a model as new data is measured and available in real-time or near real-time. Brian Douglas covers what online...
See MoreThis book was the main reference for my video. Specifically, check out chapter 11 which covers online system identification. If you don't have access to this book, several of the other resources below still provide a good theoretic background.
System Identification: Theory for the User
From the Back Cover
The field's leading text, now completely updated.
Modeling dynamical systems ― theory, methodology, and applications.
Lennart Ljung's System Identification: Theory...
See MoreThis is a nice short introduction to online estimation by Mathworks. Plus, it has links to other useful pages that describe the functions to implement online estimation.
What Is Online Estimation?
This Mathworks document describes online estimation. Online estimation algorithms estimate the parameters and states of a model when new data is available during the operation of the...
See MoreThis is the Simulink example that I highlighted in the video. I think it's helpful to start with a completed example like this when you're first learning. It gives you something that already works and you can tweak some of the parameters and see how they affect the end result.
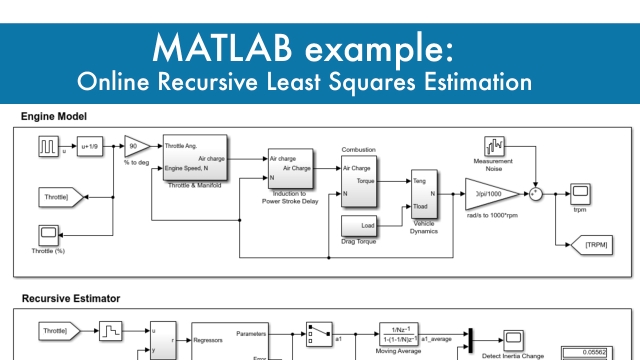
MATLAB Example: Online Recursive Least Squares Estimation
This example shows how to implement an online recursive least squares estimator. You estimate a nonlinear model of an internal combustion engine and use recursive least squares to detect...
See MoreThis is another example that shows how online system identification can be used as part of an adaptive MPC controller.
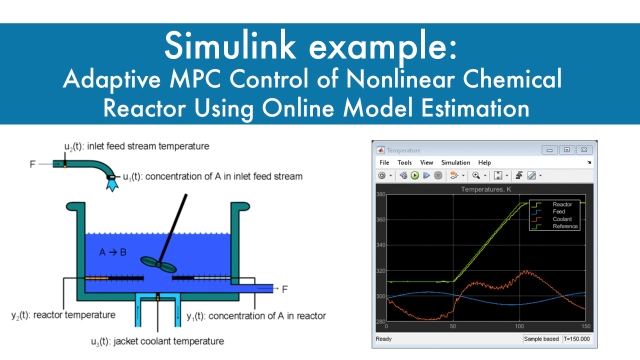
Simulink example: Adaptive MPC Control of Nonlinear Chemical Reactor Using O...
This example shows how to use an Adaptive MPC controller to control a nonlinear continuous stirred tank reactor (CSTR) as it transitions from low conversion rate to high conversion rate.
A...
See MoreThe DC motor model that I derived came from this great write up. It's worth checking out! (Plus, everything on this control tutorials website is great!)
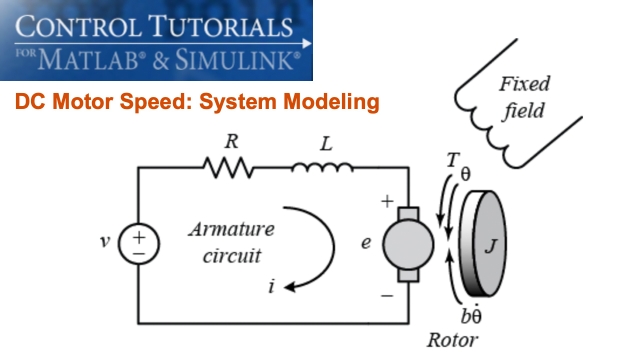
DC Motor Speed: System Modeling
This examples walks through modeling a simple DC motor in MATLAB.
See MoreThis is an example of DC Motor fault detection in MATLAB/Simulink.
Online Fault Detection for a DC Motor
Program embedded processors to estimate parameters and detect changes in motor dynamics in real time using System Identification Toolbox™.
See MoreThis MATLAB example uses an EKF as the statistical estimation method. The write-up is really helpful as you walk through the code that implements it.
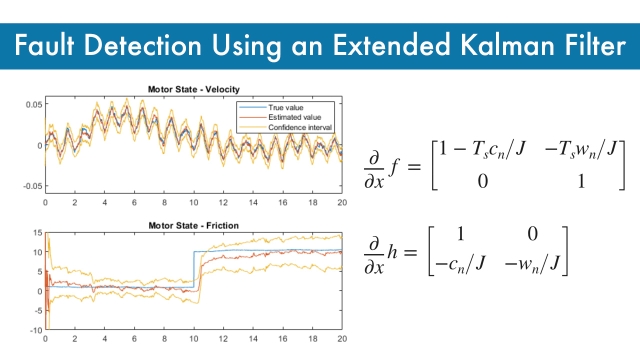
MATLAB Example: Fault Detection Using an Extended Kalman Filter
This example shows how to use an extended Kalman filter for fault detection. The example uses an extended Kalman filter for online estimation of the friction of a simple DC motor...
See MoreIf you need a little background on the Kalman filter, this MATLAB Tech Talk series by Melda Ulusoy is a good place to start.

Understanding Kalman Filters, Part 1: Why Use Kalman Filters?
Discover common uses of Kalman filters by walking through some examples. A Kalman filter is an optimal estimation algorithm used to estimate states of a system from indirect and uncertain...
See MoreI've also created this journey on the Kalman filter that walks through an introduction, theory, and implementation of a Kalman filter.
Introduction to the Kalman Filter
If you've heard of the Kalman filter before but haven't had a chance to understand what it is, how it helps us solve state estimation problems, or how to implement one yourself, then this is the journey for you. It is broken up into several sections:
- Prerequisites - the information you might need before starting this journey
- Introduce the basic concepts - an overview of the filter with minimal mathematics
- Watch others use it - Check out the Kalman filter in action on other people's projects
- Try it yourself - A few different ways to implement and test the filter on your own
- Fundamentals - A more mathematically rigorous approach to the filter
- Other variations - Looking at the EKF, UKF, and expanding into the particle filter
- Other material - Things to check out if you're interested in exploring some more
See More
I haven't read this book but it came highly recommended so I thought I'd include it at the end of this journey. Might be worth checking out!
Model Identification and Adaptive Control - From Windsurfing to Telecommunic...
This book is based on a workshop entitled: "Model Identification and Adaptive Control: From Windsurfing to Telecommunications" held in Sydney, Australia, on December 16, 2000. The workshop...
See More