
A proportional–integral–derivative controller (PID controller or three-term controller) is a control loop mechanism employing feedback that is widely used in industrial control systems and a variety of other applications requiring continuously modulated control. A PID controller continuously calculates an error value, e(t), as the difference between a desired setpoint (SP) and a measured process variable (PV) and applies a correction based on proportional, integral, and derivative terms (denoted P, I, and D respectively), hence the name.
Topic
Proportional-Integral-Derivative (PID) Controller
This topic includes the following resources and journeys:
Filters
Type
Experience
Scope
56 items
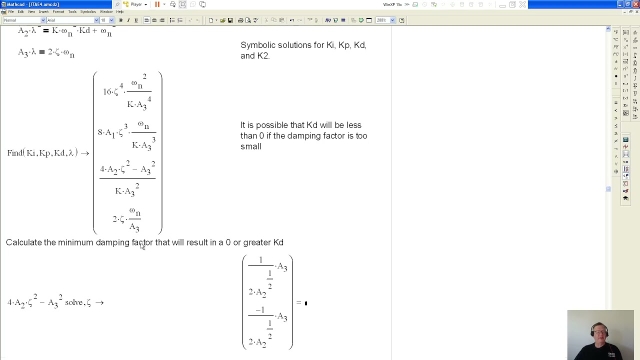
Peter Ponders PID - Integrated Time Absolute Error - 4 Pole example
17 min
Beginner
Video
Theory
This video shows how to calculate the coefficients for a 4 pole ITAE and how to use the 4 pole ITAE to calculate closed loop controller gains.
See More
Standard HW Problem #1: PID and Root Locus
18 min
Beginner
Video
Theory
A walk through of a typical homework problem using the root locus method to tune a PID controller. This is the first in what may be a series of homework style problems I'll cover. This is...
See More
Direct Synthesis for PID Design Intro
11 min
Beginner
Video
Theory
Direct Synthesis for PID Design Intro
See More
Peter Ponders PID-Fuzzy Logic vs PID
10 min
Beginner
Video
Theory
There are many academic and engineering papers showing how good fuzzy logic control is relative to PID control. Every FL vs PID paper I have seen compares...
See More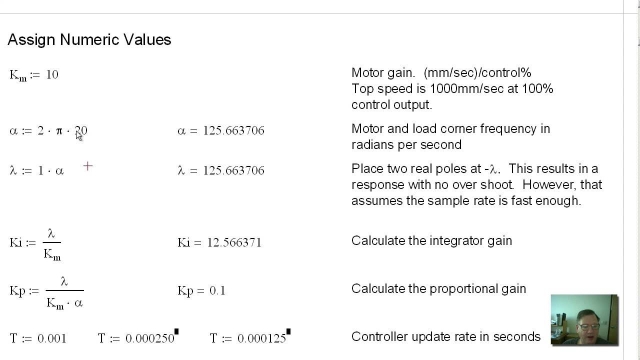
Peter Ponders PID - T0P1 Part 4, Misc Topics
20 min
Beginner
Video
Theory
This video covers another way to compute symbolic gains, the difference between having the P gain act on the error or just the feedback, extending bandwidt...
See More