
A proportional–integral–derivative controller (PID controller or three-term controller) is a control loop mechanism employing feedback that is widely used in industrial control systems and a variety of other applications requiring continuously modulated control. A PID controller continuously calculates an error value, e(t), as the difference between a desired setpoint (SP) and a measured process variable (PV) and applies a correction based on proportional, integral, and derivative terms (denoted P, I, and D respectively), hence the name.
Topic
Proportional-Integral-Derivative (PID) Controller
This topic includes the following resources and journeys:
Filters
Type
Experience
Scope
1 items
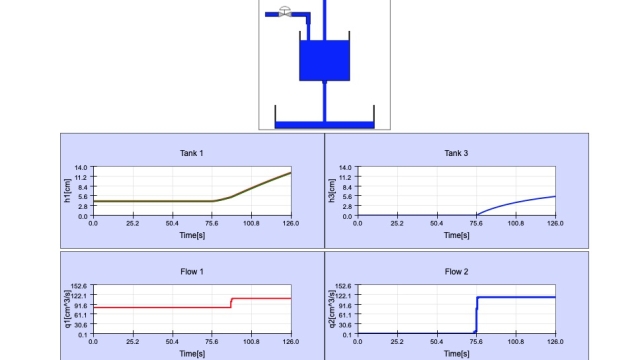
Virtual Lab for a Two-tanks system
Beginner
Virtual Lab
Application
This is a virtual lab for a two-tank system that can be used for modelling and control learing/teaching purposes. Open-loop tests and closed-loop simulatons based on PI control or PI plus...
See More