
A proportional–integral–derivative controller (PID controller or three-term controller) is a control loop mechanism employing feedback that is widely used in industrial control systems and a variety of other applications requiring continuously modulated control. A PID controller continuously calculates an error value, e(t), as the difference between a desired setpoint (SP) and a measured process variable (PV) and applies a correction based on proportional, integral, and derivative terms (denoted P, I, and D respectively), hence the name.
Topic
Proportional-Integral-Derivative (PID) Controller
This topic includes the following resources and journeys:
Filters
Type
Experience
Scope
2 items

Quanser QUBE-Servo 2: Low-cost Teaching Platform for Controls
Beginner
Hardware
Application
The Quanser QUBE-Servo 2 is a fully integrated, modular servomotor lab experiment designed for teaching mechatronics and control concepts at the undergraduate level. Ideal for teaching speed...
See More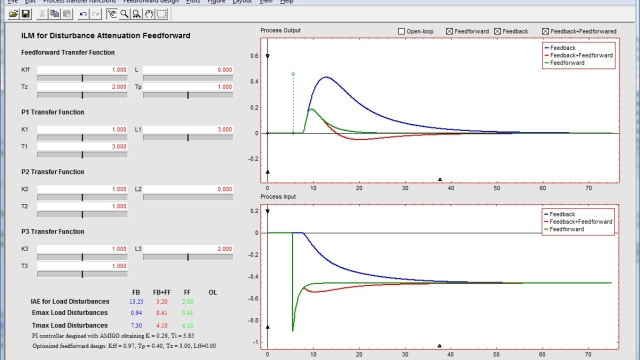
An interactive feedforward tool for FeedForward Control
Beginner
App
Application
This interactive software tool is focused on basic and advanced concepts of feedforward control.
See More