

Introductory course on aerial robotics, University of Pennsylvania
Beginner
Video
Theory
This course exposes you to the mechanics, design, control, and planning of robotic flight in 3 dimensional environments for micro-aerial vehicles, with an emphasis on quadrotors.
See More
Particle Filter Explained without Equations
7 min
Beginner
Video
Theory
This video provides a quick graphical introduction to the particle filter. It does a good job building some intuition behind the filter without ever touching on any mathematics. It's worth a...
See More
Peter Ponders PID-Fuzzy Logic vs PID
10 min
Beginner
Video
Theory
There are many academic and engineering papers showing how good fuzzy logic control is relative to PID control. Every FL vs PID paper I have seen compares...
See More
Machine Learning and Cross-Validation
7 min
Beginner
Video
Theory
This lecture discusses the importance of cross-validation to assess models obtained via machine learning.
See More
Extremum Seeking Control: Challenging Example
8 min
Intermediate
Video
Theory
This lecture explores the use of extremum-seeking control (ESC) to solve a challenging control problem with a right-half plane zero.
See More
Trimming a Model of a Dynamic System Using Numerical Optimization
60 min
Intermediate
Video
Theory
In this video we show how to find a trim point of a dynamic system using numerical optimization techniques. We generate a cost function that corresponds to a straight and level flight...
See More
Second Order Dynamics in Process Control
17 min
Beginner
Video
Theory
How do we simulate two first order transfer functions in series, a inherently second order system, or two coupled differential equations? Tune in to find out!
See More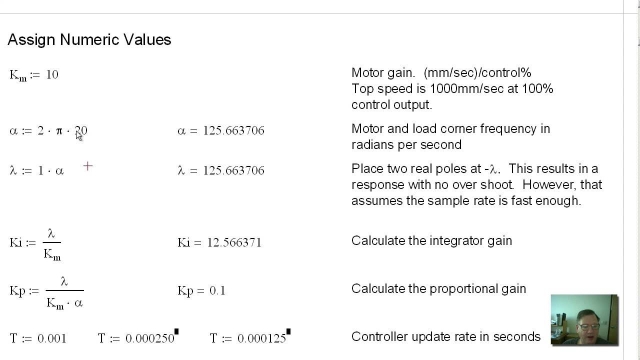
Peter Ponders PID - T0P1 Part 4, Misc Topics
20 min
Beginner
Video
Theory
This video covers another way to compute symbolic gains, the difference between having the P gain act on the error or just the feedback, extending bandwidt...
See More
Understanding Model Predictive Control, Part 2: What is MPC?
6 min
Beginner
Video
Theory
Learn how model predictive control (MPC) works. Using a simple car example, this video provides insight into an MPC controller’s strategy for finding the optimal steering wheel angle to...
See More
Fourier Series: Part 1
12 min
Beginner
Video
Theory
This video will show how to approximate a function with a Fourier series, which is an infinite sum of sines and cosines. We will discuss how these sines and cosines form a basis for the...
See More
How the Flight Controller Code Works - dRehmFlight VTOL
20 min
Intermediate
Video
Application
This video will walk you through the flight controller code of dRehmFlight VTOL to give you a better understanding of the contents and structure. The hope is that it will cover almost...
See More
Visually Determining Transfer Functions
6 min
Beginner
Video
Theory
Process Control classes can get pretty hard to follow when you lose sight of what transfer functions really are. How do you get them in the first place?
See More
What Is a Control System and Why Should I Care? (Part 1)
38 min
Beginner
Video
Application
This talk introduces the basic concepts of feedback with lots of visual examples.
See More
Deploying Deep Learning Models | Deep Learning for Engineers, Part 5
15 min
Beginner
Video
Theory
This video covers the additional work and considerations you need to think about once you have a deep neural network that can classify your data. We need to consider that the trained network...
See More
Solving the 1D Wave Equation
118 min
Beginner
Video
Theory
In this video, we solve the 1D wave equation. We utilize the separation of variables method to solve this 2nd order, linear, homogeneous, partial differenti...
See More
Lecture 15: Root Locus
53 min
Beginner
Video
Theory

Computing Euler Angles: The Euler Kinematical Equations and Poisson’s Kinema...
79 min
Beginner
Video
Theory
In this video we discuss how the time rate of change of the Euler angles are related to the angular velocity vector of the vehicle. This allows us to design...
See More
Frequency domain – tutorial 12: FT of periodic signals
10 min
Beginner
Video
Theory
In this video, we learn how to find the Fourier transform for periodic signals. The following materials are covered:1) relation between Fourier transform and...
See More
Sketching Root Locus Part 2
16 min
Beginner
Video
Theory
This is the second part of how to sketch a root locus by hand. However instead of following the normal rules for sketching a locus that you'd see in a book, I decided to explain the rules...
See More
Lecture 1 Introduction to Automatic Control
29 min
Beginner
Video
Theory

Bandwidth of a Dynamic System
30 min
Beginner
Video
Theory
In this video we discuss the definition and physical meaning of the bandwidth of a dynamic system. We’ll see that this is a performance metric that is used ...
See More
Bode Plots by Hand: Real Poles or Zeros
13 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More
Time domain - tutorial 6: elementary signals
11 min
Beginner
Video
Theory
In this video, we cover two elementary signals, unit step and unit impulse, which will be extensively used in this course. The following materials are covere...
See More![Cayley-Hamilton Theorem [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_395.jpg?itok=Xi08rPqq "Cayley-Hamilton Theorem [Control Bootcamp]")
Cayley-Hamilton Theorem [Control Bootcamp]
6 min
Beginner
Video
Theory
Here we describe the Cayley-Hamilton Theorem, which states that every square matrix satisfies its own characteristic equation. This is very useful to prove results related to...
See More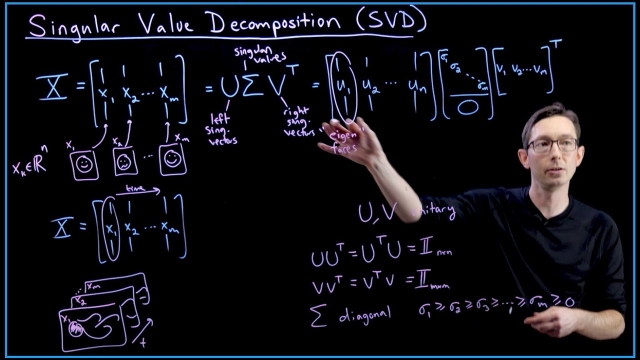
Singular Value Decomposition (SVD): Mathematical Overview
12 min
Intermediate
Video
Theory
This video presents a mathematical overview of the singular value decomposition (SVD).
See More