


Lecture 29: State space representation
29 min
Beginner
Video
Theory
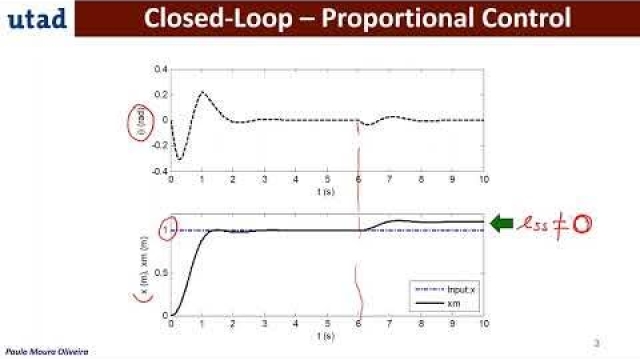
Posicast Control 5 - (In English)
7 min
Beginner
Video
Theory
In this video Posicast in closed-loop is illustrated using a gantry-crane system simulations.
See More
Lecture 19: Lead and PD compensator Design using Root Locus
54 min
Beginner
Video
Theory

Relationship Between Poles and Performance of a Dynamic System
43 min
Beginner
Video
Theory
In this video we establish the relationship between pole locations and associated performance of a dynamic system. This relationship is useful to translate ...
See More![SVD: Eigenfaces 2 [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_414.jpg?itok=L4yTxfyV)
SVD: Eigenfaces 2 [Matlab]
8 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Matlab code, part 2).
See More
Lecture 14: Routh Hurwitz Criterion
22 min
Beginner
Video
Theory
")
Laplace domain – tutorial 2: Region of Convergence (ROC)
8 min
Beginner
Video
Theory
In this video, we learn five golden rules on how to quickly find the Region of Convergence (ROC) of Laplace transform. Learn Signal Processing 101 in 31 lect...
See More
Laplace domain – tutorial 3: Laplace transform tables
17 min
Beginner
Video
Theory
In this video, we cover Laplace transform tables which help us to quickly find Laplace and inverse Laplace transforms. The main learning objective is to full...
See More
Control Bootcamp: Loop shaping
7 min
Beginner
Video
Theory
This video explores shaping the loop transfer function to have desirable sensitivity and complementary sensitivity.
See More
Relative Gain Array RGA Analysis
6 min
Beginner
Video
Theory
I cover how you can find the relative gain array from the steady state gain array, and interpret the results to determine which input to pair with which outp...
See More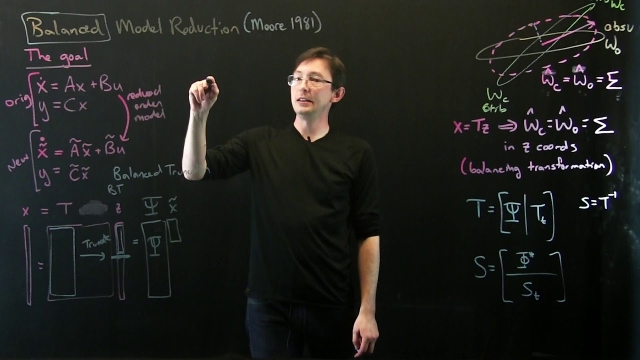
Data-Driven Control: Balanced Truncation
14 min
Intermediate
Video
Theory
In this lecture, we describe the balanced truncation procedure for model reduction, where a handful of the most controllable and observable state directions are kept for the reduced-order...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 2 - Given a M...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Sparse Identification of Nonlinear Dynamics for Model Predictive Control
12 min
Intermediate
Video
Theory
This lecture shows how to use sparse identification of nonlinear dynamics with control (SINDYc) with model predictive control to control nonlinear systems purely from data.
See More
State Space in Process Control
10 min
Beginner
Video
Theory
An overview on how we can derive a state space model from a given set of state variables and inputs, as well as an intro to deviation variables. This is part...
See More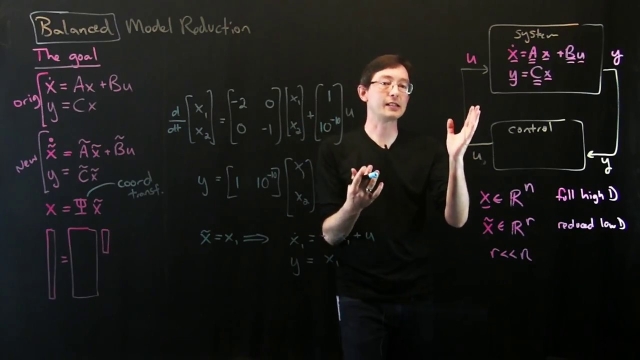
Data-Driven Control: The Goal of Balanced Model Reduction
15 min
Intermediate
Video
Theory
In this lecture, we discuss the overarching goal of balanced model reduction: Identifying key states that are most jointly controllable and observable, to capture the most input—output...
See More
RL Course by David Silver - Lecture 6: Value Function Approximation
97 min
Intermediate
Video
Theory
A deep dive into incremental methods and batch methods of value function approximation.
See More control")
Control Bootcamp: Cruise Control Example with Proportional-Integral (PI) co...
23 min
Beginner
Video
Theory
In this video, we show that introducing integral control reduces the steady-state tracking error to zero in the cruise control example. We also use a more sophisticated model for the...
See More
State Space to Transfer Function
48 min
Beginner
Video
Theory
In this video we show how to transform a linear state space representation of a dynamic system to an equivalent transfer function representation. We will de...
See More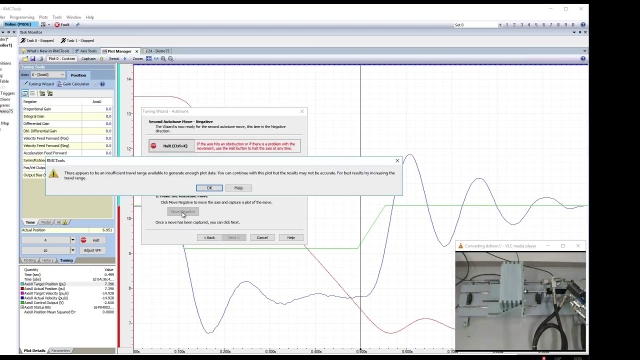
Peter Ponders PID, Natural Frequency vs Frequency of Acceleration
9 min
Beginner
Video
Theory
This video is intended for servo hydraulic system designers and those that program hydraulic servo systems but it does show how several of the techniques sho...
See More
Extremum Seeking Control in Simulink
26 min
Beginner
Video
Application
This lecture explores extremum-seeking control (ESC) on a simple example in Matlab’s Simulink.
See More
Using a Homogeneous Transformation Matrix to Combine Rotation and Translatio...
63 min
Beginner
Video
Theory
In this video we discuss how to properly deal with coordinate frames that are both rotated and translated from one another. We develop a homogeneous transfo...
See More
Peter Ponders PID - Observers/Estimators
26 min
Beginner
Video
Theory
![Fourier Series and Gibbs Phenomena [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_364.jpg?itok=-v1tvO0q "Fourier Series and Gibbs Phenomena [Python]")
Fourier Series and Gibbs Phenomena [Python]
8 min
Beginner
Video
Application
This video will describe how to compute the Fourier Series in Python and Gibbs Phenomena that appear for discontinuous functions.
See More
Manipulating Aerodynamic Coefficients
25 min
Intermediate
Video
Theory
In this video we discuss some potential problems you may encounter when attempting to perform operations with dimensionless aerodynamic coefficients such as CL and CD.
See More
Root Locus Plot: Common Questions and Answers
17 min
Beginner
Video
Theory
In this video I go through some of the common questions I've received on my other root locus videos. 1) Why do we call the poles of a system the roots?2) How do I plot the damping ratio...
See More