


Why Digital Beamforming Is Useful for Radar
13 min
Intermediate
Video
Theory
Learn how you can use digital beamformers to improve the performance and functions of radar systems. The MATLAB Tech Talk series on radar covered how to use radar to determine range, range...
See More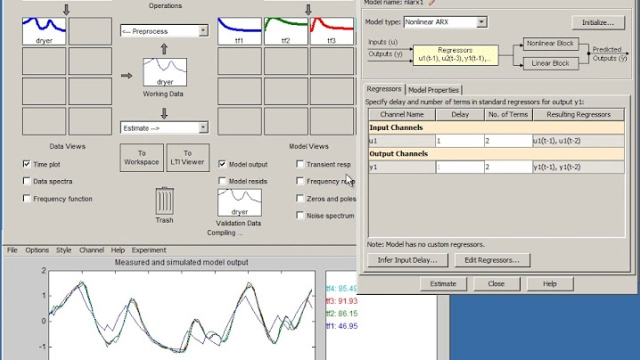
Introduction to System Identification
46 min
Beginner
Video
Theory
In this webinar, you will have a unique chance to learn about system identification from a world-renowned subject expert, Professor Lennart Ljung. Professor Ljung will explain the basic...
See More
Discrete control #6: z-plane warping and the bilinear transform
25 min
Beginner
Video
Theory
We’re continuing our journey through discrete control and in this video, we’re going to expand our understanding of the bilinear transform. Along the way, we’ll learn about how this...
See More
What Is Extremum Seeking Control? | Learning-Based Control
16 min
Beginner
Video
Theory
Get an introduction to extremum seeking control—an adaptive control method for finding an optimal control input or set of system parameters without needing a model of your system, static...
See More
Understanding Closed-Loop Control
9 min
Beginner
Video
Demonstration
This lecture discusses the differences between open loop and closed loop control in a very easy and intuitive way. Daily examples, like a dishwasher, plant irrigation, and car speed systems...
See More")
Koopman Spectral Analysis (Control)
15 min
Intermediate
Video
Theory
In this video, we explore extensions of Koopman theory for control systems. Much of the excitement and promise of Koopman operator theory is centered around the ability to represent...
See More
What Is Fuzzy Logic | Fuzzy Logic Part 1
16 min
Beginner
Video
Theory
This video introduces fuzzy logic and explains how you can use it to design a fuzzy inference system (FIS), which is a powerful way to use human experience to design complex systems...
See More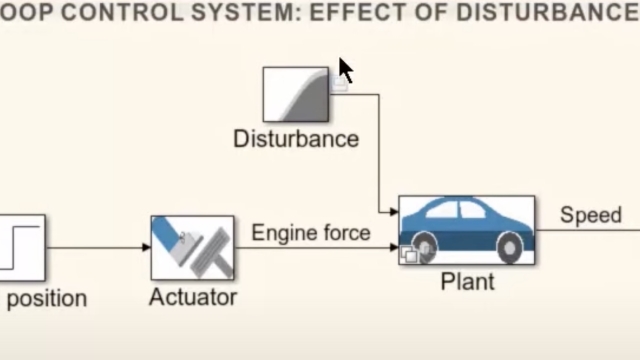
Understanding Control Systems: The Disturbance Rejection Problem
6 min
Beginner
Video
Demonstration
This video provides a demonstration using a car to show how you can simulate open- and closed-loop systems in Simulink®.
First, you will learn how to model and tune open-loop systems. The...
See More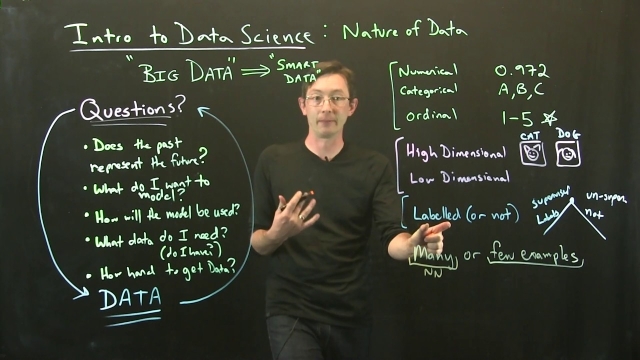
Intro to Data Science: The Nature of Data
12 min
Beginner
Video
Theory
This lecture discusses the types of data you might encounter, and how it determines which techniques to use.
See More
System Identification: Koopman with Control
10 min
Intermediate
Video
Theory
This lecture provides an overview of the use of modern Koopman spectral theory for nonlinear control. In particular, we develop control in a coordinate system defined by eigenfunctions of...
See More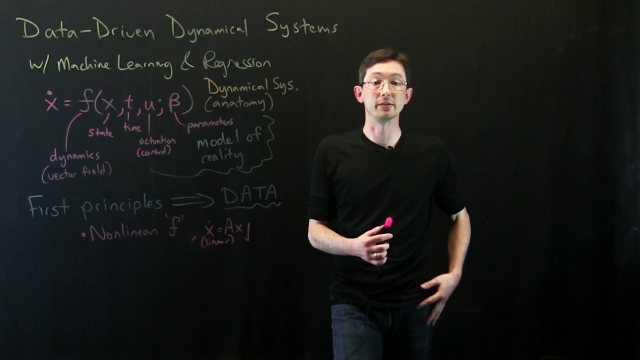
Data-Driven Dynamical Systems Overview
21 min
Intermediate
Video
Theory
This video provides a high-level overview of this new series on data-driven dynamical systems. In particular, we explore the various challenges in modern dynamical systems, along with...
See More
Control Bootcamp: Kalman Filter Example in Matlab
22 min
Beginner
Video
Application
This lecture explores the Kalman Filter in Matlab on an inverted pendulum on a cart.
See More
Control Systems in Practice, Part 8: The Gang of Six in Control Theory
18 min
Beginner
Video
Theory
When analyzing feedback systems, we can get caught up thinking solely about the relationship between the reference signal and the output. However, to fully understand how a feedback system...
See More
But what is the Fourier Transform? A visual introduction.
20 min
Beginner
Video
Theory
An animated introduction to the Fourier Transform.
See More
Discrete control #4: Discretize with the matched method
14 min
Beginner
Video
Theory
This is the fourth video on discrete control and in this video we are going to continue exploring the different techniques we can use to discretize a continuous system and talk about the...
See More
Resonance in Nature and Bioinspired Squid Robots
18 min
Beginner
Video
Demonstration
Bioinspired robots combine the best of both biology and engineering. Using tools learned from nature, we can build squid-like and other squishy robots to improve current capabilities in...
See More
Advances in feedforward control for measurable disturbances (in Spanish)
60 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More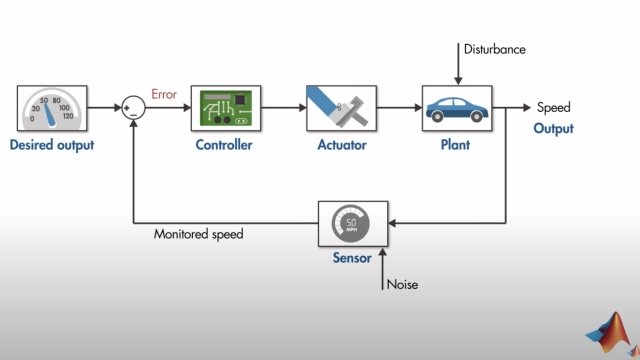
Understanding Control Systems: Components of a Feedback Control System
5 min
Beginner
Video
Demonstration
This video introduces the components of a feedback control system and how they interact with each other.
Learn basic terminology by walking through examples that include driving a car...
See More
Systems Engineering, Part 1: What Is Systems Engineering?
15 min
Beginner
Video
Theory
This video covers what systems engineering is and why it’s useful. We will present a broad overview of how systems engineering helps us develop complex projects that meet the program...
See More
Understanding the Z-Transform
20 min
Beginner
Video
Theory
This intuitive introduction shows the mathematics behind the Z-transform and compares it to its similar cousin, the discrete-time Fourier transform. Mathematically, the Z-transform is...
See More
Nyquist Stability Criterion, Part 2
18 min
Beginner
Video
Theory
An explanation of the Nyquist Stability Criterion part 2. This video steps through the how to sketch a Nyquist plot by hand, what to do if there are open loop pools on the imaginary axis...
See More
Vibrational Control in Insect Flight
7 min
Intermediate
Video
Application
Abstract: It is generally accepted among biology and engineering communities that insects are unstable at hover. However, existing approaches that rely on direct averaging do not fully...
See More
Why Choose Model-Based Reinforcement Learning?
15 min
Intermediate
Video
Theory
What is the difference between model-free and model-based reinforcement learning? Explore the differences and results as the learning models are applied to balancing a cart/pole system as an...
See More
Discrete control #3: Designing for the zero-order hold
13 min
Beginner
Video
Theory
This is the third video on discrete control and in this video, I want to clear up a confusion that I caused last time regarding using the ZOH method to discretize a continuous controller and...
See More
Block Diagram Algebra
89 min
Beginner
Video
Theory
In this video we introduce block diagrams (AKA signal flow diagrams). We explore how they are used to describe complex systems as well as how to perform blo...
See More