

![Linear Regression 2 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_437.jpg?itok=jfYpmzNR "Linear Regression 2 [Python]")
Linear Regression 2 [Python]
5 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for linear regression in Python (part 2).
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 11 - Fast Rei...
79 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Machine Learning Control: Tuning a PID Controller with Genetic Algorithms
16 min
Beginner
Video
Theory
This lecture shows how to use genetic algorithms to tune the parameters of a PID controller. Tuning a PID controller with genetic algorithms is not generally recommended, but is used to...
See More
Laplace Transforms to Derive Transfer Functions
14 min
Beginner
Video
Theory
Once we have a state space model, we will take a Laplace Transform to derive the transfer function to determine the response of an output relative to an inpu...
See More
Control System with MATLAB - Block Diagram Reduction
32 min
Beginner
Video
Theory

Understanding Model Predictive Control, Part 7: Adaptive MPC Design with Sim...
8 min
Beginner
Video
Theory
In this video, you will learn how to design an adaptive MPC controller for an autonomous steering vehicle system whose dynamics change with respect to the longitudinal velocity. After you...
See More
Stability of Closed Loop Control Systems
11 min
Beginner
Video
Theory
This video explains why we need design tools like the Routh-Hurwitz Criterion, Bode Plots, Nyquist Plots, and Root Locus. This is an introduction into the difficulties of determining the...
See More
Direct Synthesis for PID Controller Design
12 min
Beginner
Video
Theory
What tuning parameters should you choose for your controller? The Direct Synthesis Model is one method control engineers use today to evaluate controller par...
See More
Designing a Lag Compensator with Root Locus
11 min
Beginner
Video
Theory
This video walks through a phase lag compensator example using the Root Locus method.
See More
Fuzzy Inference System Walkthrough | Fuzzy Logic Part 2
16 min
Beginner
Video
Theory
This video walks step-by-step through a fuzzy inference system. Learn about concepts like membership function shapes, fuzzy operators, multiple-input inference systems, and rule firing...
See More
Simple Examples of PID Control
13 min
Beginner
Video
Theory
In this video I continue the topic of PID control. We walk through a simple control system and visualize how each of the three paths, P, I, and D, all address specific problems that arise...
See More![Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_306.jpg?itok=SzmzyZ6Z)
Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]
10 min
Beginner
Video
Theory
Here we use the Cayley-Hamilton Theorem to show that the full state space is reachable if and only if the system is controllable.
See More
State Space Representation of Differential Equations
69 min
Beginner
Video
Theory
In this video we show how to represent differential equations (either linear or non-linear) in state space form. This is useful as it allows us to combine an...
See More
Tuning a Fuzzy Logic Controller with Data | Fuzzy Logic, Part 4
18 min
Beginner
Video
Theory
This video covers the basics of data-driven approaches to tuning fuzzy inference systems. See what it means to find an optimal solution, which fuzzy inference parameters are being tuned...
See More
Data-Driven Control: Change of Variables in Control Systems (Correction)
2 min
Intermediate
Video
Theory
This video corrects a typo in the previous lecture.
See More
Computing Euler Angles: The Euler Kinematical Equations and Poisson’s Kinema...
79 min
Beginner
Video
Theory
In this video we discuss how the time rate of change of the Euler angles are related to the angular velocity vector of the vehicle. This allows us to design...
See More
MIT 6.S191: Introduction to Deep Learning
Beginner
Video
Theory
MIT's introductory course on deep learning methods with applications to computer vision, natural language processing, biology, and more! Students will gain foundational knowledge of deep...
See More
Sketching Root Locus Part 2
16 min
Beginner
Video
Theory
This is the second part of how to sketch a root locus by hand. However instead of following the normal rules for sketching a locus that you'd see in a book, I decided to explain the rules...
See More
Discrete control #5: The bilinear transform
15 min
Beginner
Video
Theory
This is video number five on discrete control and here, we’re going to cover the famous and useful bilinear transform. The bilinear transform is yet another method for converting, or mapping...
See More
Bandwidth of a Dynamic System
30 min
Beginner
Video
Theory
In this video we discuss the definition and physical meaning of the bandwidth of a dynamic system. We’ll see that this is a performance metric that is used ...
See More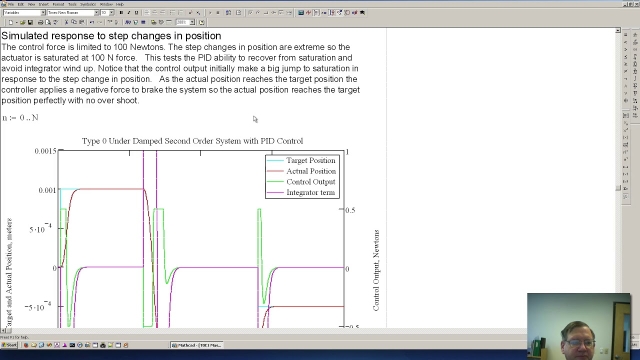
Peter Ponders PID - Controlling an Under Damp Mass and Spring System
24 min
Beginner
Video
Theory
Demonstrates:How to calculate the PID gains. The importance of the derivative gain. How to simulate the mass and spring systemControl limitations based on s...
See More
Control Bootcamp: Benefits of Feedback on Cruise Control Example
14 min
Beginner
Video
Theory
Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise control example.
See More
Solving the 1D Wave Equation
118 min
Beginner
Video
Theory
In this video, we solve the 1D wave equation. We utilize the separation of variables method to solve this 2nd order, linear, homogeneous, partial differenti...
See More
Laplace domain – tutorial 1: Laplace transform
15 min
Beginner
Video
Theory
In this video, we learn about Laplace transform which enables us to travel from time to the Laplace domain. The following materials are covered:1) why we nee...
See More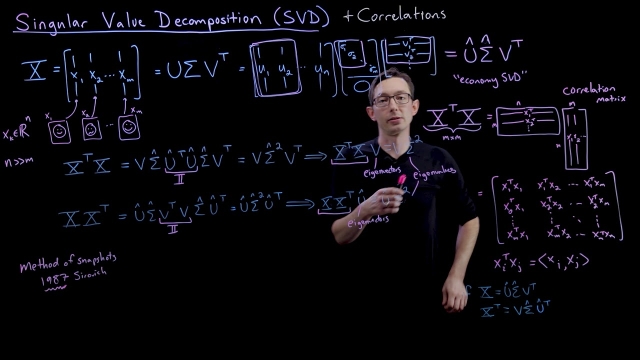
SVD Method of Snapshots
4 min
Beginner
Video
Theory
This video describes how to compute the singular value decomposition (SVD) using the method of snapshots, by Sirovich 1987.
See More