

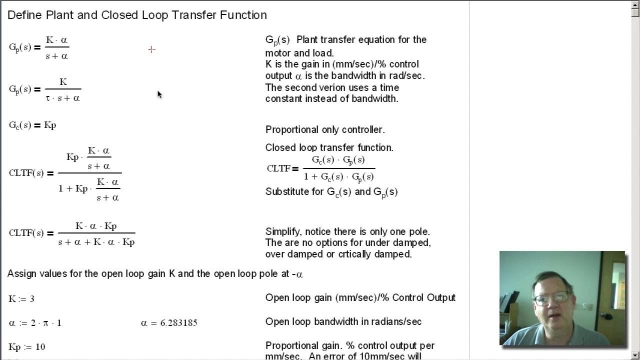
Peter Ponders PID - Controlling non-integrating single pole system. Part 1 ...
10 min
Beginner
Video
Theory
Part 1 shows why P only control shouldn't be used because the set point or target is never reached.Part 2 shows why I only control shouldn't be used because ...
See More")
Introduction to the Fourier Transform (Part 1)
13 min
Beginner
Video
Theory
This video is an introduction to the Fourier Transform. I try to give a little bit of background into what the transform does and then I go step by step through explaining the Inverse...
See More
Understanding Sensor Fusion and Tracking, Part 5: How to Track Multiple Obje...
15 min
Beginner
Video
Theory
This video describes two common problems that arise when tracking multiple objects: data association and track maintenance. We cover a few ways to solve these issues and provide a general...
See More
The Navigation Equations: Computing Position North, East, and Down
52 min
Intermediate
Video
Theory
In this video we show how to compute the inertial velocity of a rigid body in the vehicle-carried North, East, Down (NED) frame. This is achieved by rotating the velocity expressed in the...
See More
Lecture 11: Transient Response and Numerical Problems
30 min
Beginner
Video
Theory
![Randomized SVD Code [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_402.jpg?itok=pmR7mX3g)
Randomized SVD Code [Python]
10 min
Beginner
Video
Application
This video describes the randomized singular value decomposition (rSVD) (Python code).
See More
Derivation of Rodrigues’ Rotation Formula
43 min
Intermediate
Video
Theory
In this video we explain and derive Rodrigues’ Rotation Formula. This functions describes how to rotate an arbitrary vector about another arbitrary axis of rotation. This has applications to...
See More
Lecture 21: Introduction to Frequency Response
57 min
Beginner
Video
Theory
![SVD: Eigenfaces 4 [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_418.jpg?itok=dWTN1neh)
SVD: Eigenfaces 4 [Matlab]
6 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Matlab code, part 4).
See More
Lecture 23: Bode plots
48 min
Beginner
Video
Theory
")
Koopman Spectral Analysis (Multiscale systems)
5 min
Intermediate
Video
Theory
In this video, we discuss recent applications of data-driven Koopman theory to multi-scale systems.
See More
Control Bootcamp: Three Equivalent Representations of Linear Systems
12 min
Beginner
Video
Theory
This video explores three equivalent representations of linear systems: State-space ODEs, Frequency domain transfer functions, and Time-domain impulse response convolution.
See More
Bode Stability Criterion in Frequency Response Analysis Intro
12 min
Beginner
Video
Theory
The Bode stability criterion allows us to quickly determine the stability and relative stability of a transfer function. It uses a graphical method that can ...
See More
Solving the 1D Heat Equation
47 min
Beginner
Video
Theory
In this video we simplify the general heat equation to look at only a single spatial variable, thereby obtaining the 1D heat equation. We solving the result...
See More
Linear Systems of Equations
10 min
Beginner
Video
Theory
This video describes linear systems of equations and when they have solutions.
See More
Machine Learning Goals
7 min
Beginner
Video
Theory
This lecture discusses the high-level goals of machine learning, and what we want out of our models. Goals include speed and accuracy, along with interpretability, generalizability...
See More
Feedforward Control Intro
7 min
Beginner
Video
Theory
If we know how a disturbance will affect an output, we can proactively change our manipulated variable to counteract it.
See More
Time domain - tutorial 11: system properties from impulse response
13 min
Beginner
Video
Theory
In this video, we learn how to find system properties from the impulse response. Specifically, memoryless, causal, stable and invertible systems will be ful...
See More
Direct Synthesis for PID Design Intro
11 min
Beginner
Video
Theory
Direct Synthesis for PID Design Intro
See More
Time domain - tutorial 2: signal representation
2 min
Beginner
Video
Theory
In this video, we review how to represent information as a signal. The information can be anything such as voice (1D) or an image (2D) or even a video (3D). ...
See More
Introduction to Ordinary Differential Equations
35 min
Beginner
Video
Theory
In this video we introduce the concept of ordinary differential equations (ODEs). We give examples of how these appear in science and engineering as well as...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 12 - Fast Rei...
81 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
Drone Simulation and Control, Part 4: How to Build a Model for Simulation
11 min
Beginner
Video
Theory
This video describes how a good model of the drone and the environment it operates in can be used for simulation and test. It shows how nonlinear and linear models are both needed for...
See More
Gaussian/Normal Distributions
99 min
Beginner
Video
Theory
In this video we discuss the Gaussian (AKA Normal) probability distribution function. We show how it relates to the error function (erf) and discuss how to ...
See More
Peter Ponders PID - Simulation Methods, Which is Best?
22 min
Beginner
Video
Theory