


Control System with MATLAB - Block Diagram Reduction
32 min
Beginner
Video
Theory

The Frobenius Norm for Matrices
2 min
Intermediate
Video
Theory
This video describes the Frobenius norm for matrices as related to the singular value decomposition (SVD).
See More
Stability of Closed Loop Control Systems
11 min
Beginner
Video
Theory
This video explains why we need design tools like the Routh-Hurwitz Criterion, Bode Plots, Nyquist Plots, and Root Locus. This is an introduction into the difficulties of determining the...
See More
Designing a Lag Compensator with Root Locus
11 min
Beginner
Video
Theory
This video walks through a phase lag compensator example using the Root Locus method.
See More
Vector Derivatives (the Equation of Coriolis) and the Angular Velocity Vecto...
72 min
Intermediate
Video
Theory
In this video we develop the Equation of Coriolis which describes how a vector in a rotating reference frame changes from the perspective of an observer in a non-rotating reference frame. We...
See More
Control Systems Lectures - Time and Frequency Domain
10 min
Beginner
Video
Theory
This lecture introduces the time and frequency domains. A very quick description of the Laplace Transform is given which will be the base of many of classical control lectures in the future...
See More
Routh Stability Criterion Intro and Example
13 min
Beginner
Video
Theory
I introduce and walk through an example problem of how we can use the Routh Stability Criterion to rigorously determine the necessary and sufficient conditio...
See More![Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_306.jpg?itok=SzmzyZ6Z)
Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]
10 min
Beginner
Video
Theory
Here we use the Cayley-Hamilton Theorem to show that the full state space is reachable if and only if the system is controllable.
See More
Sparse Identification of Nonlinear Dynamics for Model Predictive Control
12 min
Intermediate
Video
Theory
This lecture shows how to use sparse identification of nonlinear dynamics with control (SINDYc) with model predictive control to control nonlinear systems purely from data.
See More
State Space in Process Control
10 min
Beginner
Video
Theory
An overview on how we can derive a state space model from a given set of state variables and inputs, as well as an intro to deviation variables. This is part...
See More
Data-Driven Control: Error Bounds for Balanced Truncation
11 min
Intermediate
Video
Theory
In this lecture, we derive error bounds for the balanced truncation.
See More
Derivation and Solution of Laplace’s Equation
33 min
Beginner
Video
Theory
In this video we show how the heat equation can be simplified to obtain Laplace’s equation. We investigate how to solve Laplace’s equation using separation ...
See More
Data Preprocessing and the Short-Time Fourier Transform | Deep Learning for ...
16 min
Beginner
Video
Theory
Data in its raw form might not be ideal for training a network. There are some changes we can make to the data that are often desired or sometimes necessary in order to make training faster...
See More
Drone Simulation and Control, Part 3: How to Build the Flight Code
18 min
Beginner
Video
Theory
This video describes how to create quadcopter flight software from the control architecture developed in the last video. It covers how to process the raw sensor readings and use them with...
See More")
Frequency domain – tutorial 1: concept of frequency (with Chinese subtitle)
9 min
Beginner
Video
Theory
In this video, the following materials are covered:1) intuitive explanation on the frequency concept 2) what is the relation between time and frequency domai...
See More
Peter Ponders PID - KalmanFilters, Alpha-Beta-Gamma filters
16 min
Beginner
Video
Theory
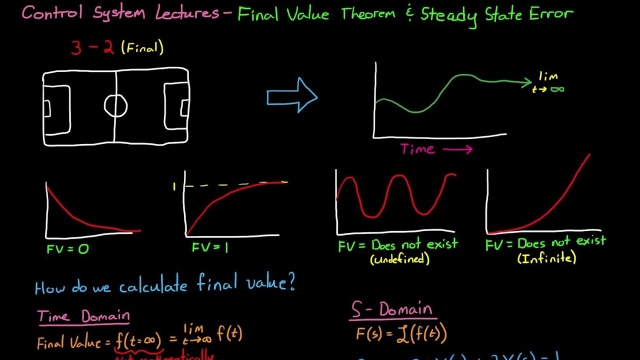
Final Value Theorem and Steady State Error
12 min
Beginner
Video
Theory
This Final Value Theorem is a way we can determine what value the time domain function approaches at infinity but from the S-domain transfer function. This is very helpful when we're trying...
See More
Frequency domain – tutorial 5: Fourier transform
9 min
Beginner
Video
Theory
In this video, we learn about Fourier transform which enables us to travel from time to frequency domain when a signal is not periodic. The learning objectiv...
See More
Robotic Car, Closed Loop Control Example
13 min
Beginner
Video
Application
I demonstrate the value of closed loop control in an uncertain environment using my Zumo Robot car. If you're interested in building one yourself and trying this out I think I've given you...
See More
Peter Ponders PID - System Identification Advanced
19 min
Beginner
Video
Theory

Linearizing a Simulink Model Using the Linear Analysis Tool and ‘linmod’
55 min
Beginner
Video
Application
In this video we show how to linearize a non-linear Simulink model using numerical techniques. This approach is extremely powerful as it allows automatic ge...
See More")
The Discrete Fourier Transform (DFT)
17 min
Beginner
Video
Application
This video introduces the Discrete Fourier Transform (DFT), which is how to numerically compute the Fourier Transform on a computer. The DFT, along with its fast FFT implementation, is one...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 4 - Model Fre...
78 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Understanding Sensor Fusion and Tracking, Part 1: What Is Sensor Fusion?
12 min
Beginner
Video
Theory
This video provides an overview of what sensor fusion is and how it helps in the design of autonomous systems. It also covers a few scenarios that illustrate the various ways that sensor...
See More
Time Domain Analysis with Matlab: Using the Linear System Analyzer
37 min
Beginner
Video
Theory
In this video we explore various Matlab functions and workflows to perform time domain analysis of a dynamic system. This includes the use of ‘tf’, ‘step’, ...
See More