


Introduction to Partial Differential Equations
52 min
Beginner
Video
Theory
This is the first lesson in a multi-video discussion focused on partial differential equations (PDEs).In this video we introduce PDEs and compare them with o...
See More
Peter Ponders PID - Root Locus Is Useless
25 min
Beginner
Video
Theory

Solving the Heat Equation with the Fourier Transform
11 min
Beginner
Video
Theory
This video describes how the Fourier Transform can be used to solve the heat equation. In fact, the Fourier transform is a change of coordinates into the eigenvector coordinates for the...
See More
Controllability of a Linear System: The Controllability Matrix and the PBH T...
97 min
Beginner
Video
Theory
In this video we explore controllability of a linear system. We discuss two methods to test for controllability, the controllability matrix as well as the P...
See More
Time domain - tutorial 4: transformation examples
5 min
Beginner
Video
Theory
In this video, we solve examples to practice different signal transformations using a systematic approach. By the end of this lecture, you should be able to ...
See More
Understanding Sensor Fusion and Tracking, Part 4: Tracking a Single Object W...
16 min
Beginner
Video
Theory
This video describes how we can improve tracking a single object by estimating state with an interacting multiple model filter. We will build up some intuition about the IMM filter and show...
See More
Lecture 5: Block Diagram Reduction
46 min
Beginner
Video
Theory


Laplace domain – tutorial 6: Transfer function & system properties
24 min
Beginner
Video
Theory
In this video, we learn about transfer function and system properties. The following materials are covered:1) what is a transfer function?2) relation between...
See More![Randomized SVD Code [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_401.jpg?itok=3jscmfnI)
Randomized SVD Code [Matlab]
9 min
Beginner
Video
Application
This video describes the randomized singular value decomposition (rSVD) (Matlab code).
See More
Lecture 15: Root Locus
53 min
Beginner
Video
Theory

RL Course by David Silver - Lecture 1: Introduction to Reinforcement Learnin...
88 min
Intermediate
Video
Theory
Introduces reinforcment learning (RL), an overview of agents and some classic RL problems.
See More![SVD: Eigenfaces 3 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_417.jpg?itok=QFSaPoAT)
SVD: Eigenfaces 3 [Python]
5 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Python code, part 3).
See More
Lecture 1 Introduction to Automatic Control
29 min
Beginner
Video
Theory
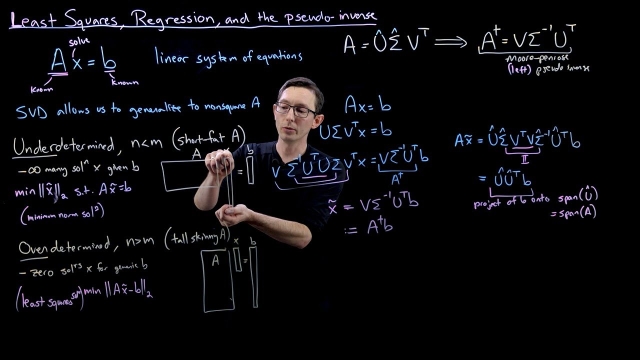
Least Squares Regression and the SVD
5 min
Beginner
Video
Theory
This video describes how the SVD can be used to solve linear systems of equations. In particular, it is possible to solve nonsquare systems (overdetermined or underdetermined) via least...
See More
Bode Plots by Hand: Real Poles or Zeros
13 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More![Cayley-Hamilton Theorem [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_395.jpg?itok=Xi08rPqq "Cayley-Hamilton Theorem [Control Bootcamp]")
Cayley-Hamilton Theorem [Control Bootcamp]
6 min
Beginner
Video
Theory
Here we describe the Cayley-Hamilton Theorem, which states that every square matrix satisfies its own characteristic equation. This is very useful to prove results related to...
See More
Machine Learning Control: Genetic Algorithms
13 min
Beginner
Video
Theory
This lecture provides an overview of genetic algorithms, which can be used to tune the parameters of a control law.
See More
Cascade Control Intro
8 min
Beginner
Video
Theory
How can we improve the disturbance rejection of our controllers using additional, relevant measurements? Tune in to find out!
See More
Computing Euler Angles: The Euler Kinematical Equations and Poisson’s Kinema...
79 min
Intermediate
Video
Theory
In this video we discuss how the time rate of change of the Euler angles are related to the angular velocity vector of the vehicle. This allows us to design an algorithm to consume...
See More
Understanding Model Predictive Control, Part 3: MPC Design Parameters
8 min
Beginner
Video
Theory
To successfully control a system using an MPC controller, you need to carefully select its design parameters. This video provides recommendations for choosing the controller sample time...
See More
Data-Driven Control: ERA/OKID Example in Matlab
8 min
Intermediate
Video
Application
In this lecture, we explore the observer Kalman filter identification (OKID) and eigensystem realization algorithm (ERA) in Matlab on an example.
See More
Dynamic Modeling in Process Control
14 min
Beginner
Video
Theory
I'll show you how we can build the dynamic models necessary to derive process transfer functions as an introduction to process control.
See More")
Control Bootcamp: Observability Example in Matlab (Part 2)
11 min
Beginner
Video
Application
This video continues to explore observability in Matlab on the example system of an inverted pendulum on a cart. We look at the observability Gramian.
See More
Drone Simulation and Control, Part 2: How Do You Get a Drone to Hover?
13 min
Beginner
Video
Theory
In the last video, we showed we can manipulate the four motors of a quadcopter to maneuver it in 3D space by getting it to roll, pitch, yaw, and change its thrust. We also covered the four...
See More