

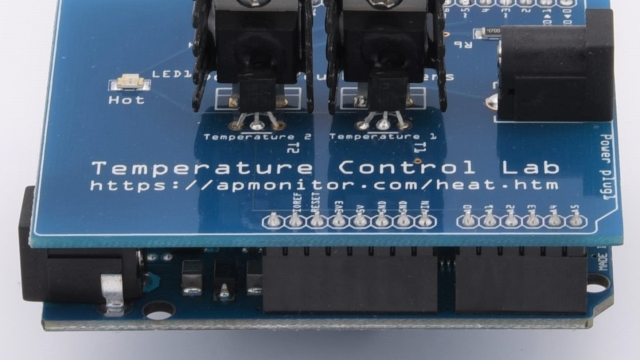
Temperature Control Lab (TCL)
Beginner
Hardware
Application
The temperature control lab is an application of feedback control with an Arduino, an LED, two heaters, and two temperature sensors. The heater power output is adjusted to maintain a desired...
See More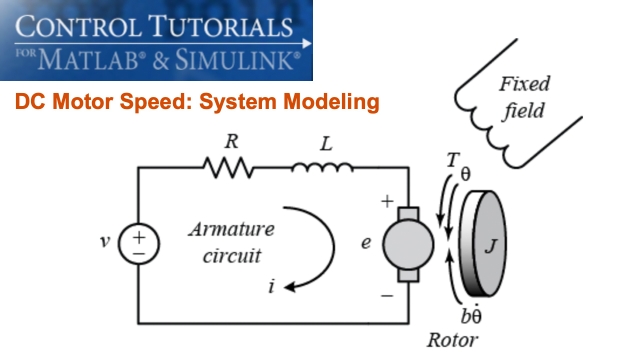
DC Motor Speed: System Modeling
Beginner
Project
Theory
This examples walks through modeling a simple DC motor in MATLAB.
See More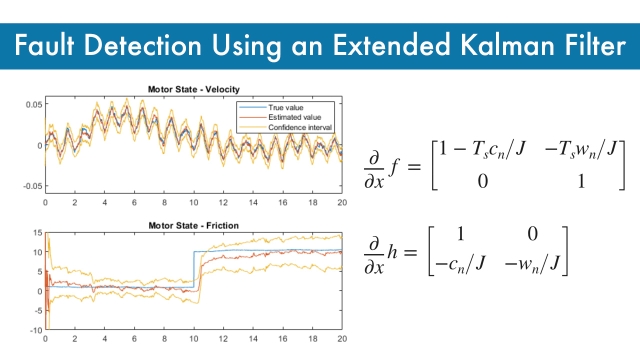
MATLAB Example: Fault Detection Using an Extended Kalman Filter
Intermediate
Project
Application
This example shows how to use an extended Kalman filter for fault detection. The example uses an extended Kalman filter for online estimation of the friction of a simple DC motor...
See More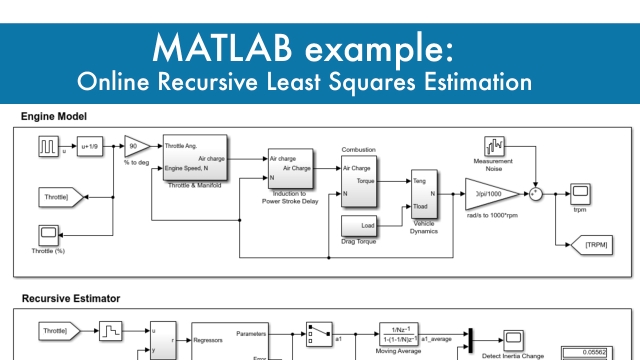
MATLAB Example: Online Recursive Least Squares Estimation
Intermediate
Project
Demonstration
This example shows how to implement an online recursive least squares estimator. You estimate a nonlinear model of an internal combustion engine and use recursive least squares to detect...
See More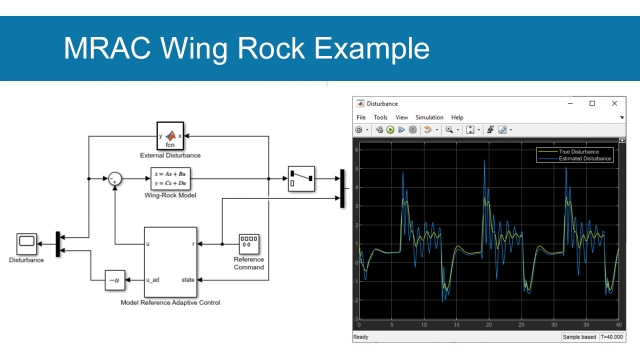
Model Reference Adaptive Control of Aircraft Undergoing Wing Rock
Intermediate
Project
Theory
This example shows how to control roll and roll rate of a delta wing aircraft undergoing wing rock. For this example, the system model is unknown. Therefore, you use model reference adaptive...
See More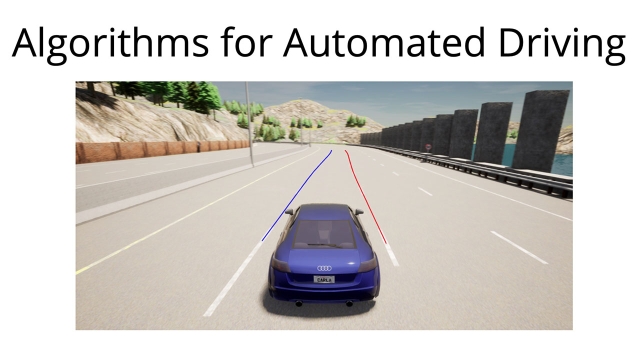
Algorithms for Automated Driving
Intermediate
Project
Application
Each chapter of this (mini-)book guides you in programming one important software component for automated driving. Currently, this book contains two chapters: Lane Detection, and Control...
See More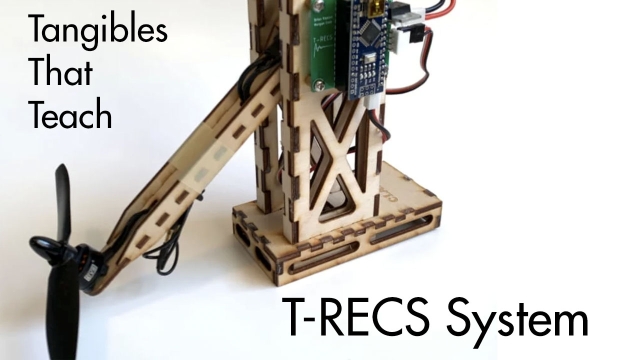
T-RECS System
Beginner
Hardware
Application
The Transportable Rotorcraft Electronic Control System (T-RECS) is a collection of components that can be built into a rotorcraft demonstrator. This hardware can be used as a test bed to...
See More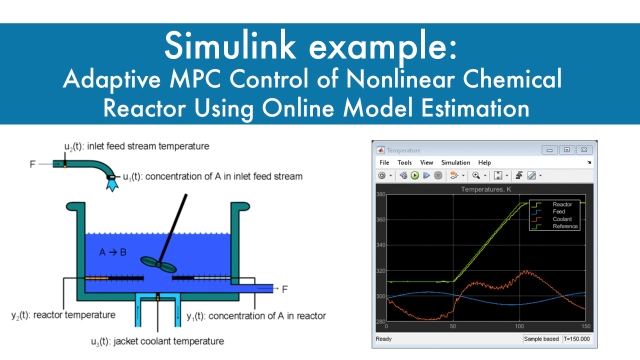
Simulink example: Adaptive MPC Control of Nonlinear Chemical Reactor Using O...
Intermediate
Project
Application
This example shows how to use an Adaptive MPC controller to control a nonlinear continuous stirred tank reactor (CSTR) as it transitions from low conversion rate to high conversion rate.
A...
See More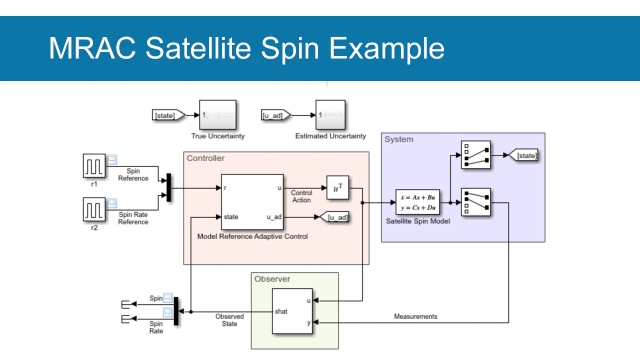
Model Reference Adaptive Control of Satellite Spin
Intermediate
Project
Theory
This example shows how to control satellite spin using model reference adaptive control (MRAC) to make the unknown controlled system match an ideal reference model. The satellite system is...
See More
Quanser QUBE-Servo 2: Low-cost Teaching Platform for Controls
Beginner
Hardware
Application
The Quanser QUBE-Servo 2 is a fully integrated, modular servomotor lab experiment designed for teaching mechatronics and control concepts at the undergraduate level. Ideal for teaching speed...
See More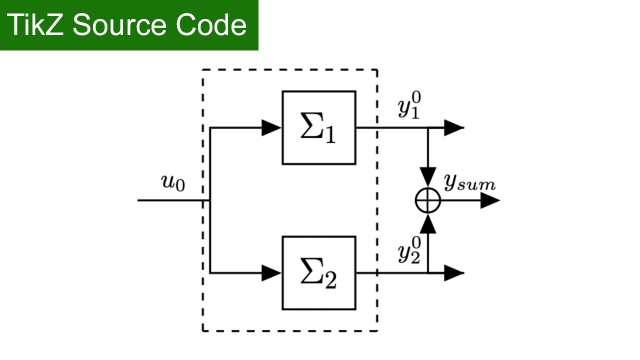
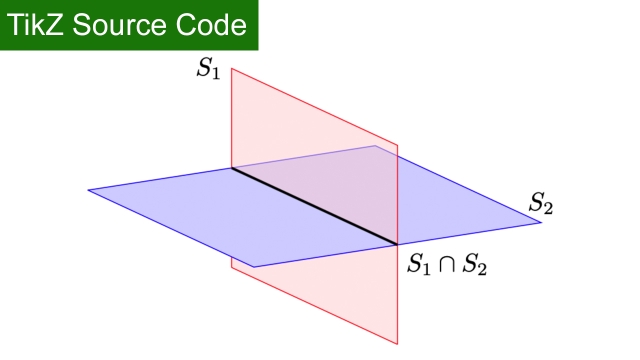
TikZ source Code: Switching Manifold
Beginner
Source Code
Application
TikZ source Code: Switching Manifold
See More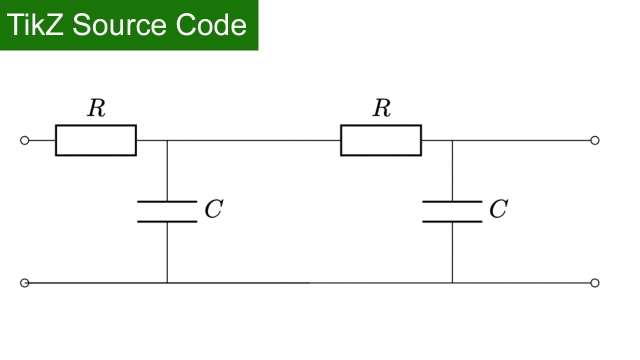
TikZ source Code: Two Interconnected RC Elements
Beginner
Source Code
Application
TikZ source Code for two Interconnected RC Elements.
See More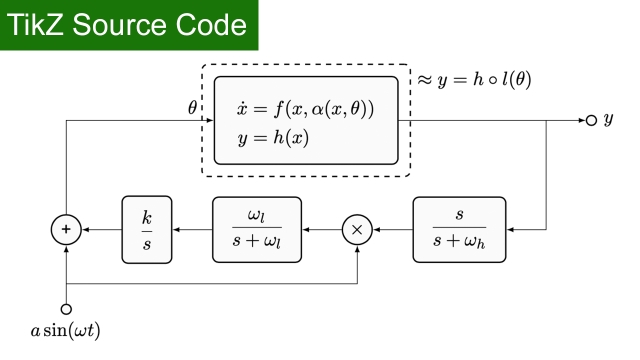
TikZ source Code: Extremum Seeking Control Block Diagram (Krstic)
Beginner
Source Code
Application
TikZ source Code: Extremum Seeking Control Block Diagram (Krstic)
See More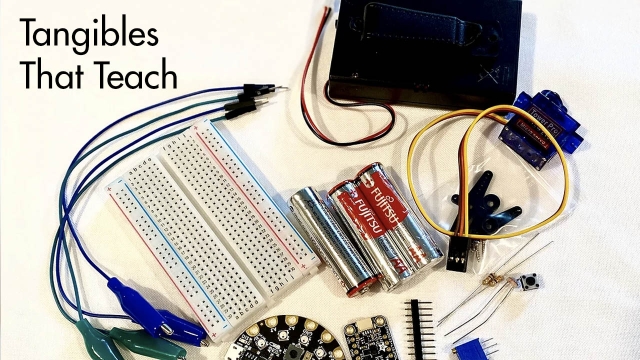
Instrument Kit for ME 316
Beginner
Hardware
Application
This hardware kit accompanies the textbook "Project Based Engineering Instrumentation with CircultPython" by Dr. Carlos Montalvo. Using this hardware and the textbook you’ll build some...
See More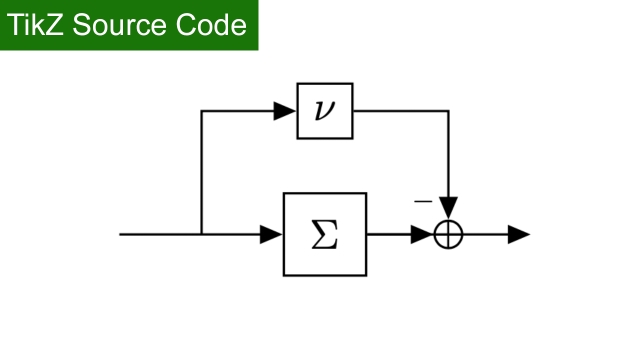
TikZ source Code: Feedforward passivity index
Beginner
Source Code
Application
TikZ source Code: Feedforward passivity index
See More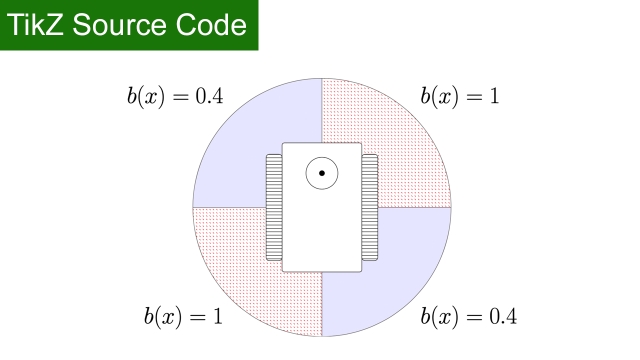
TikZ source Code: Mobile Robot Slip
Beginner
Source Code
Application
TikZ source Code: Mobile Robot Slip
See More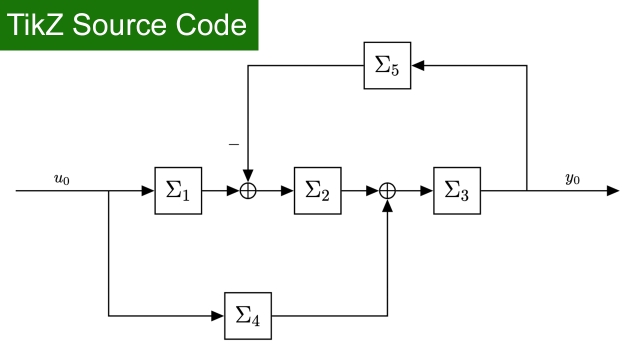
TikZ source Code: Nested subsystems
Beginner
Source Code
Application
TikZ source Code: Nested subsystems
See More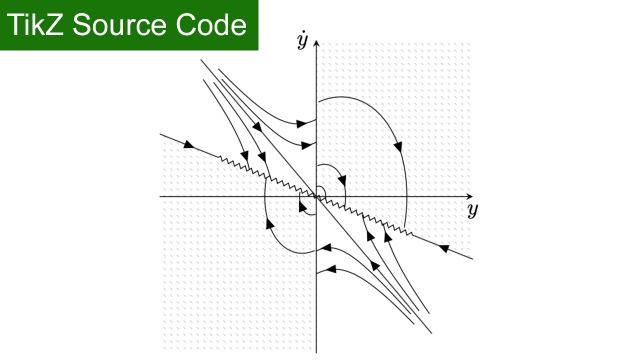
TikZ source Code: Sliding Mode Control Example
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example
See More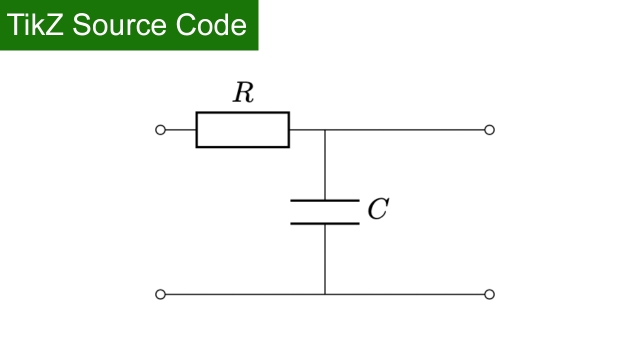
TikZ source Code: RC Lowpass
Beginner
Source Code
Application
TikZ source code for an RC Lowpass filter.
See More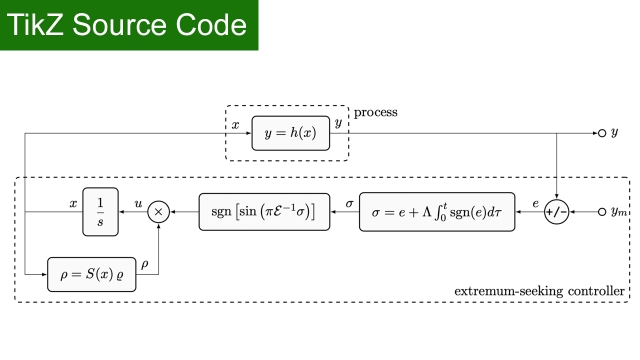
TikZ source Code: Extremum Seeking Control Block Diagram
Beginner
Source Code
Application
TikZ source Code: Extremum Seeking Control Block Diagram
See More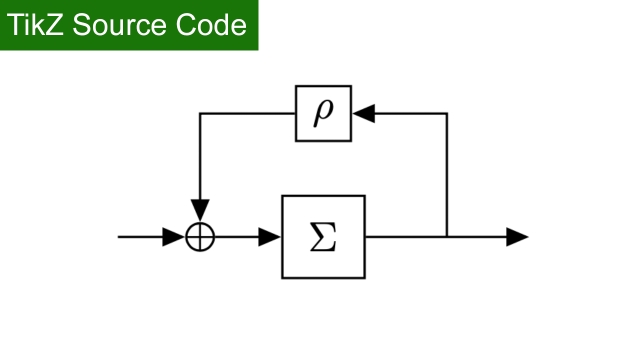
TikZ source Code: Feedback passivity index
Beginner
Source Code
Application
TikZ source Code: Feedback passivity index
See More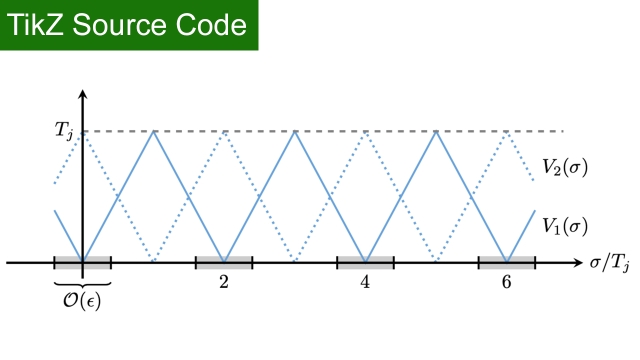
TikZ source Code: Lyapunov Lure
Beginner
Source Code
Application
TikZ source Code: Lyapunov Lure
See More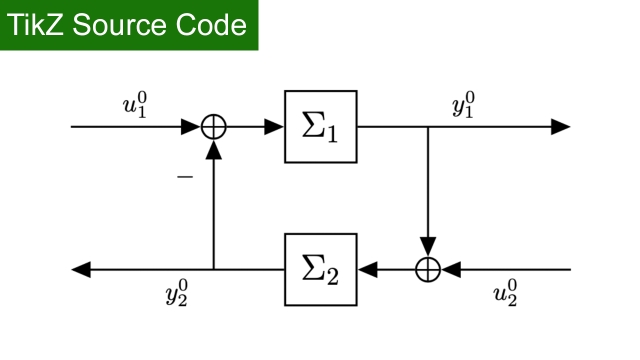
TikZ source Code: Two systems in negative feedback
Beginner
Source Code
Application
TikZ source Code: Two systems in negative feedback
See More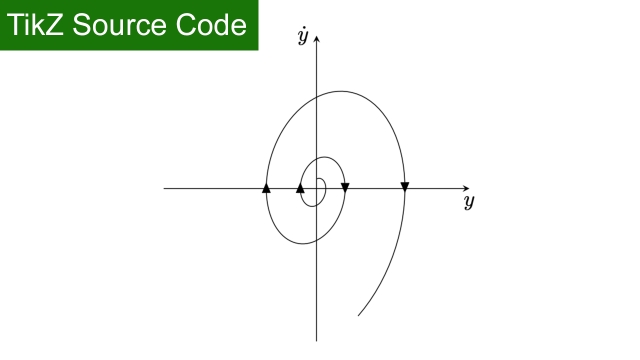
TikZ source Code: Sliding Mode Control Example System 2
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 2
See More