

Nyquist Stability Criterion
15 min
Beginner
Article / Blog
Theory
The Wikipedia article on Nyquist Stability Criterion. This covers the Nyquist plot, the Cauchy argument principle, and the stability criterion itself. A mathematical derivation is also...
See More
MATLAB Command: resid
Intermediate
Article / Blog
Application
This MATLAB command is part of the system identification toolbox and provides a way to compute and test residuals.
See More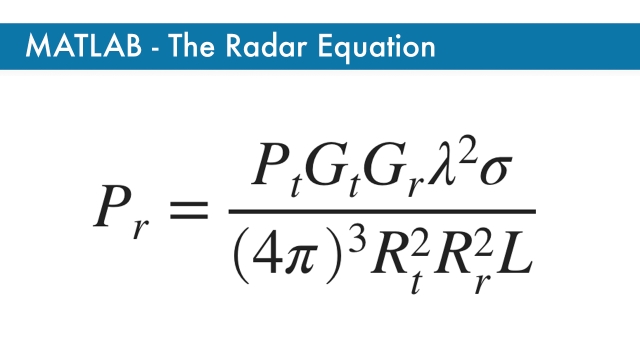
Matlab: The Radar Equation
Beginner
Article / Blog
Theory
This Mathworks page explains the parameters of the radar range equation. The point target radar range equation estimates the power at the input to the receiver for a target of a given radar...
See More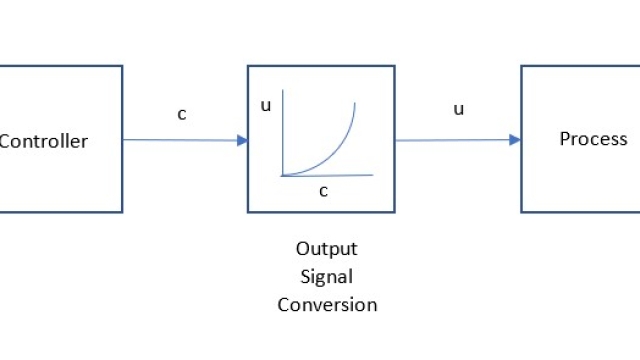
Nonlinear Control Output Signal Characterization
15 min
Intermediate
Article / Blog
Application
If the process gain makes large changes over the operating range, then tuning PID (or other linear) controllers is difficult. If tuned for one region, the controller is undesirably sluggish...
See More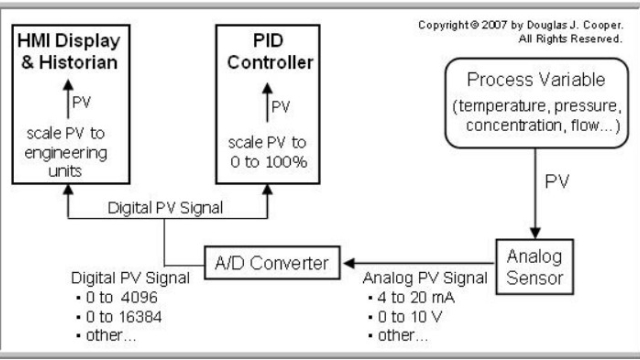
Scaled Transmission Signals, Engineering Units, and Conversions
30 min
Intermediate
Article / Blog
Application
Information is transmitted in scaled signals (4-20 mA, 3-15 psig, 0-100%, digital counts), which are also deviations from some reference vales (such as psi gage is to psia). But process...
See More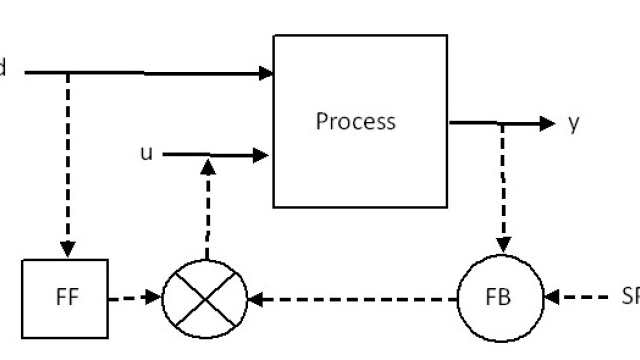
Feedforward Control
15 min
Intermediate
Article / Blog
Application
When and how to use Feedforward Control
See More
Introduction to the A* Algorithm
15 min
Beginner
Article / Blog
Application
An interactive visual explanation of the A* algorithm using motivating examples from computer games.
See More
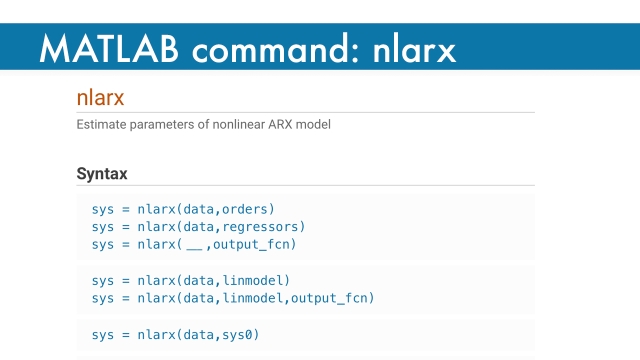
MATLAB Documentation page: nlarx command
Intermediate
Article / Blog
Application
This is the Mathworks documentation page for the nlarx MATLAB command.
See More
Model-Based Reinforcement Learning: Theory and Practice
Intermediate
Article / Blog
Theory
Blog post by Michael Janner of Berkeley Artificial Intelligence Research on model-based reinforcement learning.
See More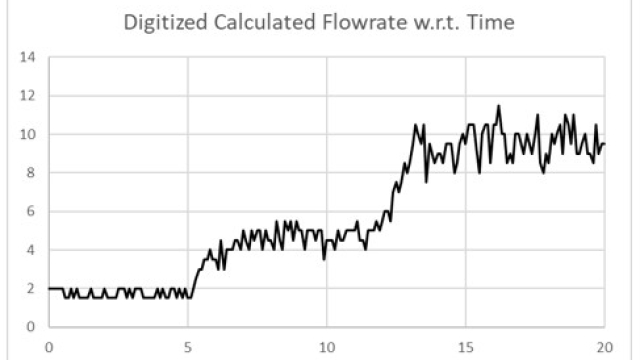
Measurements, Transmission Signals, and Issues
45 min
Intermediate
Article / Blog
Application
This is an introduction to scaled information transmission signals (for example 4-20 mA, 3-15 psig, etc.), the actual sensed signals (like using orifice dP to infer flow rate, or temperature...
See More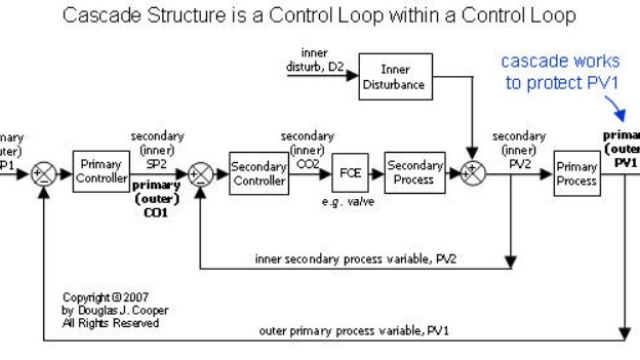
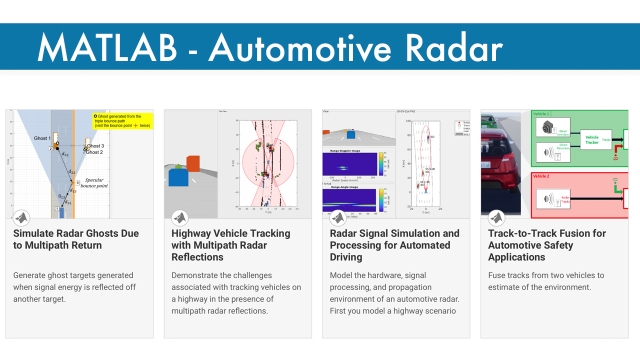
Automotive Radar MATLAB Documentation and Examples
Intermediate
Article / Blog
Theory
MATLAB documentation and examples for probabilistic and physics-based radar sensor models, simulation of MIMO antennas, waveforms, I/Q radar signals, micro-Doppler signatures, detections...
See More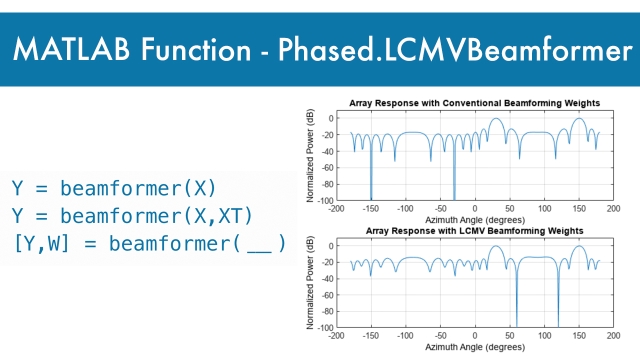
MATLAB function: phased.LCMVBeamformer
Intermediate
Article / Blog
Application
The phased.LCMVBeamformer object implements a narrowband linear-constraint minimum-variance (LCMV) beamformer for a sensor array. The LCMV beamformer belongs to the family of constrained...
See More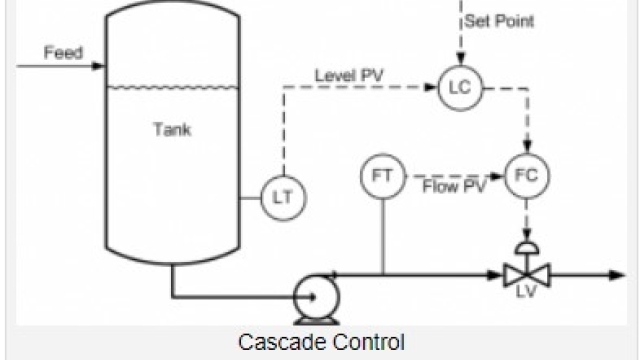
Cascade Control
30 min
Intermediate
Article / Blog
Application
What is Cascade Control and why use it?
See More
DSP Related
Beginner
Article / Blog
Application
Website with a lot of good content for any DSP scientists, researchers, and developers.
See More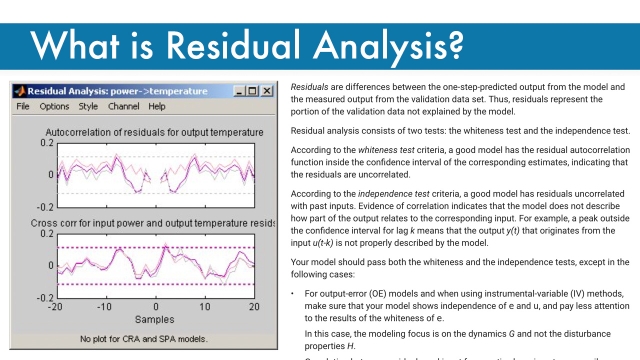
What is Residual Analysis?
Intermediate
Article / Blog
Theory
Residuals are differences between the one-step-predicted output from the model and the measured output from the validation data set. Thus, residuals represent the portion of the validation...
See More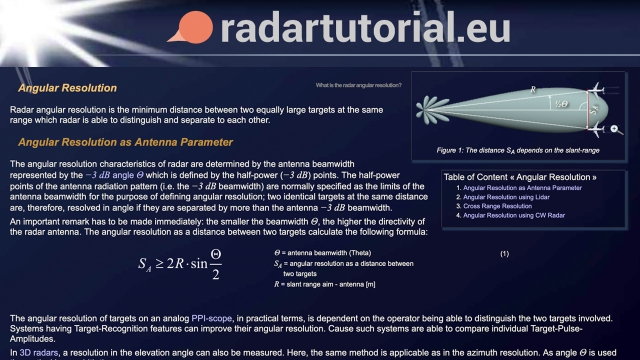
Radar Angular Resolution
Beginner
Article / Blog
Theory
This radartutorial.eu page describes angular resolution. Radar angular resolution is the minimum distance between two equally large targets at the same range which radar is able to...
See More
Orifice Calibration
15 min
Intermediate
Article / Blog
Application
The ISO method for orifice design and calibration is grounded in the ideal square-root relation between pressure drop and flow rate, specifies the in-pipe structure for an orifice, and...
See More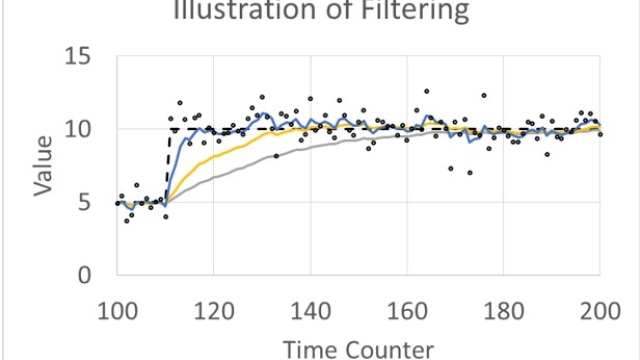
First-Order Filters
Beginner
Article / Blog
Application
Use data filters to temper noise - relation of options to lag and variance reduction
See More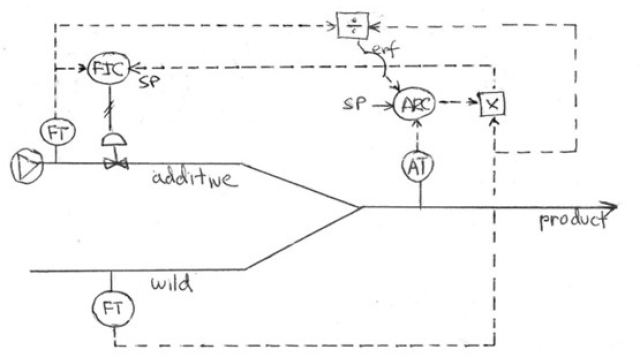
Ratio Control and Scaled Signal Calculations
15 min
Intermediate
Article / Blog
Application
When and how to use Ratio Control and use Scaled Signals
See More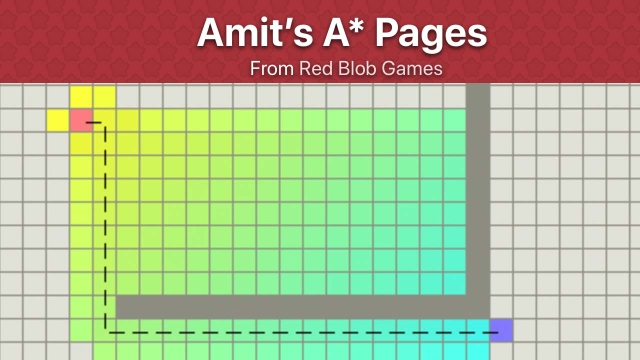
Pathfinding with A*
60 min
Beginner
Article / Blog
Application
An interactive visual explanation of the A* pathfinding algorithm. This resource uses motivating examples from computer games.
See More
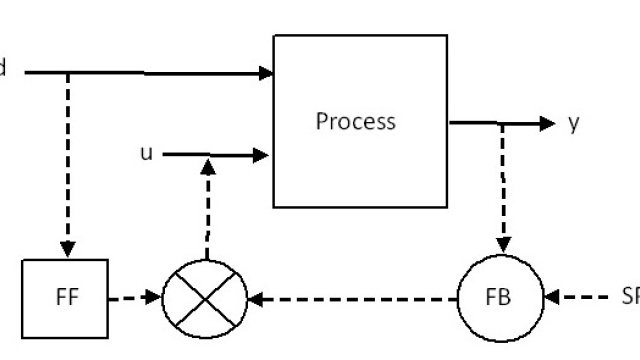
Feedforward Control
15 min
Intermediate
Article / Blog
Application
When and how to use feedforward control
See More
Overview of Dempster-Shafer Theory (Evidence Theory)
Beginner
Article / Blog
Theory
This is an overview of Dempster-Shafer Theory (Evidence Theory) that provides an introduction, definition, basic information about combination rules, some issues with the theory, and the...
See More
Kalman Filter Tutorial
Beginner
Article / Blog
Theory
The Kalman Filter is an easy topic. However, many tutorials are not easy to understand. Most require extensive mathematical background which makes them difficult to understand. Also, most...
See More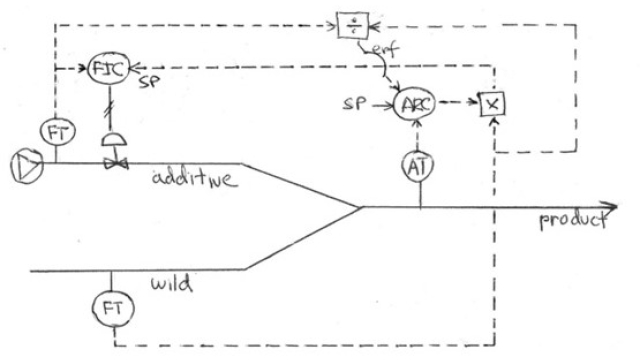
Ratio Control and Scaled Signal Calculations
15 min
Intermediate
Article / Blog
Application
When and how to use ratio, and how to implement within standard scaled signals
See More