


The Frobenius Norm for Matrices
2 min
Intermediate
Video
Theory
This video describes the Frobenius norm for matrices as related to the singular value decomposition (SVD).
See More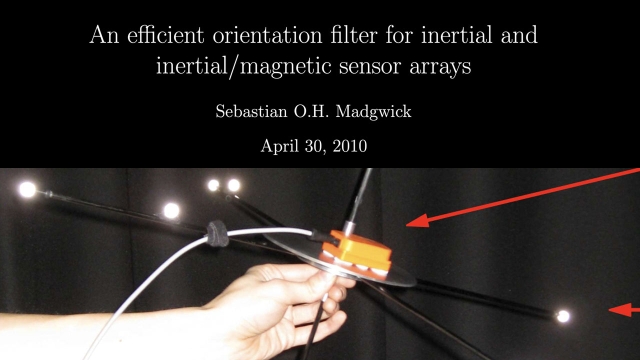
An efficient orientation filter for inertial and inertial/magnetic sensor ar...
40 min
Advanced
Peer Reviewed Paper
Theory
This report presents a novel orientation filter applicable to IMUs consisting of tri-axis gyroscopes and accelerometers, and MARG sensor arrays that also include tri-axis magnetometers. The...
See More
Time domain - tutorial 5: signal properties
11 min
Beginner
Video
Theory
In this video, we learn about some special signals which are symmetric around the y-axis (even) or around the origin (odd) . Then we talk about periodic sign...
See More
The Fourier Transform
14 min
Beginner
Video
Theory
This video will discuss the Fourier Transform, which is one of the most important coordinate transformations in all of science and engineering.
See More
Control Bootcamp: Loop Shaping Example for Cruise Control
12 min
Beginner
Video
Theory
This video demonstrates loop shaping on the cruise control model.
See More
Finding Transfer Functions from Response Graphs
9 min
Beginner
Video
Theory
Given a system response to a unit step change, in this video I'll cover how we can derive the transfer function so we can predict how our system will respond...
See More
Frequency domain – tutorial 10: modulation
22 min
Beginner
Video
Theory
In this video, we learn about modulation technique which is commonly used in communication systems to send information from transmitter to receiver. The foll...
See More
Lecture 29: State space representation
29 min
Beginner
Video
Theory

Second Order Dynamics Example
4 min
Beginner
Video
Theory
How will a second order process respond in the time domain when subjected to a unit step input? What other behaviors can we expect to see and why? Tune in to...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 7 - Imitation...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
See More
Bode Plot Gain and Phase Margin Determination
5 min
Beginner
Video
Theory
I'll show you how we can determine the Gain and Phase Margin from a Bode Plot (at some fixed controller gain).
See More
RL Course by David Silver - Lecture 3: Planning by Dynamic Programming
99 min
Intermediate
Video
Theory
Introduces policy evaluation and iteration, value iteration, extensions to dynamic programming and contraction mapping.
See More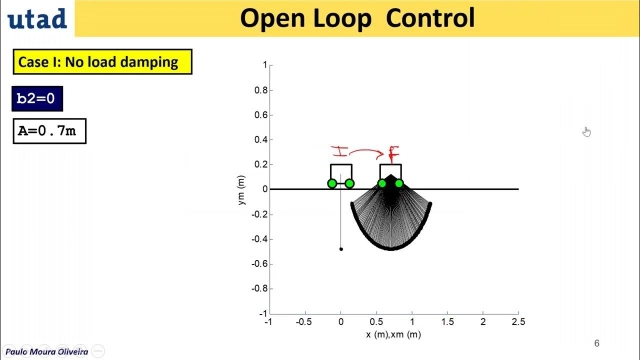
Posicast Control -3 - ( In English )
8 min
Beginner
Video
Theory
In this video a Gantry-Crane control simulation problem is introduced. The problem is presented and some introductory simulations are shown.
See More
Control Systems with MATLAB - Modelling
27 min
Beginner
Video
Theory

The Taylor Series
84 min
Beginner
Video
Theory
In this video we discuss the Taylor Series (and the closely related Maclaurin Series). These are two specific types of Power Series that allow you to approx...
See More
Humans, Robots, and Non-Prehensile Manipulation
12 min
Beginner
Video
Theory
This is a fun video that was inspired by a presentation I saw at the 2015 International Conference on Robotics and Automation (ICRA). I wanted to see if humans could duplicate the...
See More
Euler Angles and the Euler Rotation Sequence
70 min
Beginner
Video
Theory
In this video we discuss how Euler angles are used to define the relative orientation of one coordinate frame to another.Topics and Timestamps:0:00 – Introd...
See More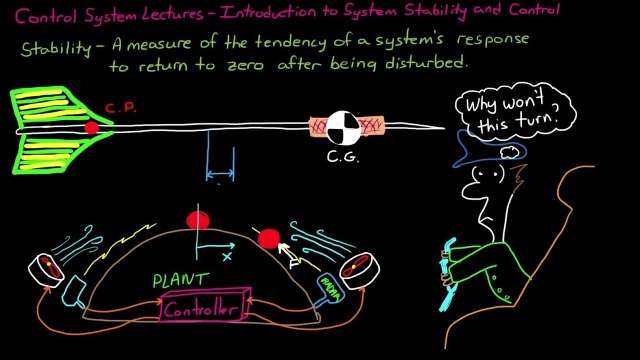
Introduction to System Stability and Control
11 min
Beginner
Video
Theory
This video attempts to provide an intuitive understanding of concepts like stability and stability margin. I briefly describe both of these topics with examples and explain how you can...
See More")
Control Bootcamp: Sensitivity and Complementary Sensitivity (Part 2)
8 min
Beginner
Video
Theory
Here we explore the sensitivity and complementary sensitivity functions, which are critical in understanding robustness and performance. (Part 2)
See More
Understanding and Sketching Individual Bode Plot Components
148 min
Beginner
Video
Theory
In this video we illustrate how 7 types of simple transfer functions contribute to a bode plot. We refer to these as ‘components’ and will cover the followi...
See More![Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_304.jpg?itok=qj48C5IZ)
Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]
10 min
Beginner
Video
Theory
This lecture explains the equivalence of controllability, reachability, and the ability to arbitrarily place eigenvalues of the closed loop system.
See More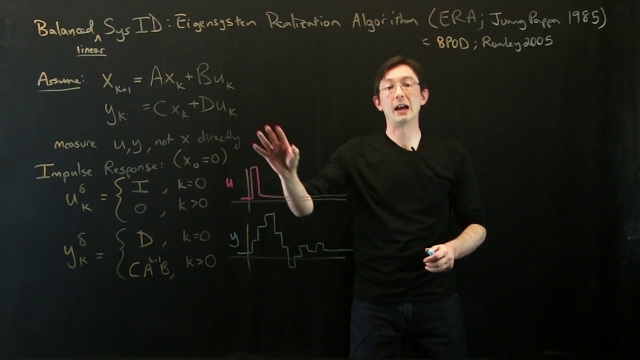
Data-Driven Control: Eigensystem Realization Algorithm
12 min
Intermediate
Video
Theory
In this lecture, we introduce the eigensystem realization algorithm (ERA), which is a purely data-driven algorithm to obtain balanced input—output models from impulse response data. ERA was...
See More
Lecture 25: Nyquist stability criterion
48 min
Beginner
Video
Theory
Peter Ponders PID, Natural Frequency vs Frequency of Acceleration
9 min
Beginner
Video
Theory
This video is intended for servo hydraulic system designers and those that program hydraulic servo systems but it does show how several of the techniques sho...
See More
Vector Derivatives (the Equation of Coriolis) and the Angular Velocity Vecto...
72 min
Intermediate
Video
Theory
In this video we develop the Equation of Coriolis which describes how a vector in a rotating reference frame changes from the perspective of an observer in a non-rotating reference frame. We...
See More