


Peter Ponders PID-Fuzzy Logic vs PID
10 min
Beginner
Video
Theory
There are many academic and engineering papers showing how good fuzzy logic control is relative to PID control. Every FL vs PID paper I have seen compares...
See More
Machine Learning Control: Genetic Algorithms
13 min
Beginner
Video
Theory
This lecture provides an overview of genetic algorithms, which can be used to tune the parameters of a control law.
See More
Cascade Control Intro
8 min
Beginner
Video
Theory
How can we improve the disturbance rejection of our controllers using additional, relevant measurements? Tune in to find out!
See More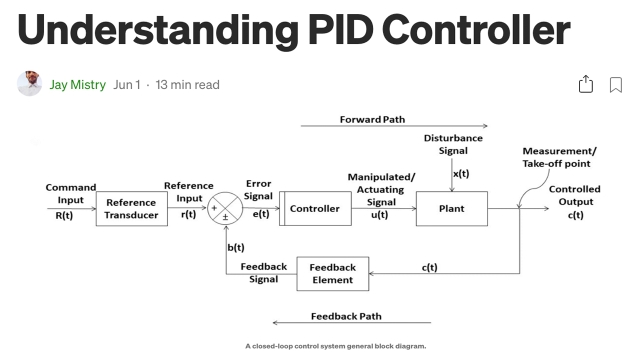
Understanding PID Controller
13 min
Beginner
Article / Blog
Theory
This blog post begins by walking through the basics and the theoretical part of the PID controllers. The controller is then tested, verified, and analyzed using MATLAB.
See More
Peter Ponders PID - T0P1 Part 4, Misc Topics
20 min
Beginner
Video
Theory
This video covers another way to compute symbolic gains, the difference between having the P gain act on the error or just the feedback, extending bandwidt...
See More
Computing the DFT Matrix
7 min
Beginner
Video
Theory
This video discusses how to compute the Discrete Fourier Transform (DFT) matrix in Matlab and Python. In practice, the DFT should usually be computed using the fast Fourier transform (FFT)...
See More
Understanding Model Predictive Control, Part 3: MPC Design Parameters
8 min
Beginner
Video
Theory
To successfully control a system using an MPC controller, you need to carefully select its design parameters. This video provides recommendations for choosing the controller sample time...
See More
Dynamic Modeling in Process Control
14 min
Beginner
Video
Theory
I'll show you how we can build the dynamic models necessary to derive process transfer functions as an introduction to process control.
See More
Predicting Second Order Transfer Function Behavior
4 min
Beginner
Video
Theory
Given a second order transfer function, I'll cover how we can predict the system behavior and derive the appropriate time constants and damping coefficient.
See More
Lecture 5: Block Diagram Reduction
46 min
Beginner
Video
Theory

Understanding PID Control, Part 3: Expanding Beyond a Simple Derivative
11 min
Beginner
Video
Theory
This video describes how to make an ideal PID controller more robust when controlling real systems that don’t behave like ideal linear models. Noise is generated by sensors and is present in...
See More
Standard 2nd Order ODEs: Natural Frequency and Damping Ratio
94 min
Beginner
Video
Theory
In this video we discuss writing 2nd order ODEs in standard form xdd(t)+2*zeta*wn*xd(t)+wn^2*x(t)where zeta = damping ratio wn = natural ...
See More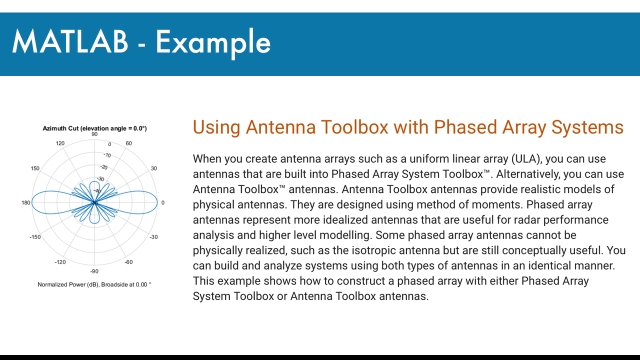
Using Antenna Toolbox with Phased Array Systems
Intermediate
Example
Theory
When you create antenna arrays such as a uniform linear array (ULA), you can use antennas that are built into Phased Array System Toolbox™. Alternatively, you can use Antenna Toolbox™...
See More
Lecture 15: Root Locus
53 min
Beginner
Video
Theory

Numerically Solving Partial Differential Equations
101 min
Beginner
Video
Theory
In this video we show how to numerically solve partial differential equations by numerically approximating partial derivatives using the finite difference me...
See More
Simple Vector Mechanics: Inner Product, Scalar/Vector Projection, and Cross ...
51 min
Intermediate
Video
Theory
In this video we discuss several simple vector operations such as: 1. Computing the magnitude of a vector 2. The inner/dot product 3. The scalar and vector projection 4. The cross product
See More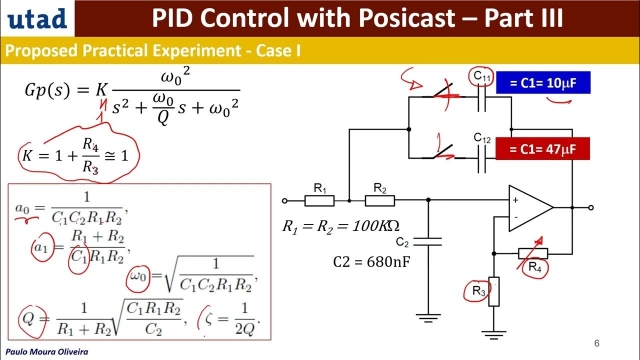
PID Control with Posicast, 9 - (In English)
11 min
Beginner
Video
Theory
This is part III of PID control with Posicast
See More
Lecture 1 Introduction to Automatic Control
29 min
Beginner
Video
Theory

Understanding The Sensitivity Function
13 min
Beginner
Video
Theory
In this video I explain the sensitivity function and try to demystify the equation used to solve for the nominal sensitivity peak. Sensitivity describes how much process variations affect...
See More
Resonant Frequency of a Dynamic System
29 min
Beginner
Video
Theory
In this video we discuss the resonant frequency of a dynamic system. We show how the resonant frequency, natural frequency, and damped natural frequency are...
See More
Velocity & Acceleration in Non-Inertial Reference Frames (Coriolis &...
133 min
Intermediate
Video
Theory
In this video we derive a mathematical description of velocity and acceleration in non-inertial reference frame. We examine the effect of fictitious forces that are witnessed by observers on...
See More
Tuning a Fuzzy Logic Controller with Data | Fuzzy Logic, Part 4
18 min
Beginner
Video
Theory
This video covers the basics of data-driven approaches to tuning fuzzy inference systems. See what it means to find an optimal solution, which fuzzy inference parameters are being tuned...
See More
Introduction to Partial Differential Equations
52 min
Beginner
Video
Theory
This is the first lesson in a multi-video discussion focused on partial differential equations (PDEs).In this video we introduce PDEs and compare them with o...
See More
Bode Plots by Hand: Real Poles or Zeros
13 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More
Lecture 6: Signal Flow Graphs and Mason's Gain Rule
47 min
Beginner
Video
Theory