


Nonhomogeneous Linear Ordinary Differential Equations
70 min
Beginner
Video
Theory
In the previous video (https://youtu.be/3Kox-3APznI) we examined solving homogeneous linear ordinary differential equations (the forcing function was equal t...
See More
Data-Driven Control: Eigensystem Realization Algorithm Procedure
17 min
Intermediate
Video
Theory
In this lecture, we describe the eigensystem realization algorithm (ERA) in detail, including step-by-step algorithmic instructions.
See More
Sketching Root Locus Part 1
13 min
Beginner
Video
Theory
Sketching a root locus by hand can be done by following some simple rules. However, more important than actually being able to sketch to plot is being able to use our knowledge to design...
See More
Designing a PID Controller Using the Root Locus Method
63 min
Beginner
Video
Theory
In this video we discuss how to use the root locus method to design a PID controller. In addition to discussing the theory, we look at Matlab tools to enabl...
See More
Peter Ponders PID-Fuzzy Logic vs PID
10 min
Beginner
Video
Theory
There are many academic and engineering papers showing how good fuzzy logic control is relative to PID control. Every FL vs PID paper I have seen compares...
See More
Control Bootcamp: Full-State Estimation
11 min
Beginner
Video
Theory
This video describes full-state estimation. An estimator dynamical system is constructed, and it is shown that the estimate converges to the true state. Further, the eigenvalues of the...
See More")
Velocity & Acceleration in Non-Inertial Reference Frames (Coriolis &...
133 min
Beginner
Video
Theory
In this video we derive a mathematical description of velocity and acceleration in non-inertial reference frame. We examine the effect of fictitious forces ...
See More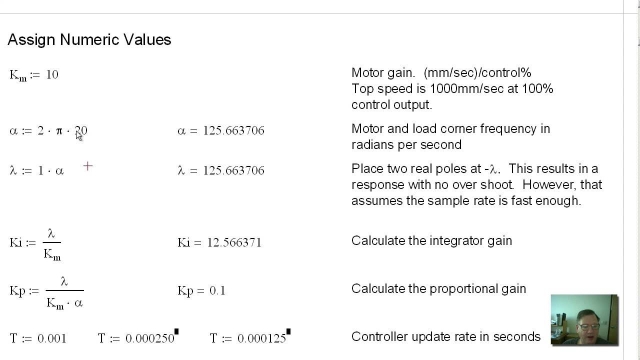
Peter Ponders PID - T0P1 Part 4, Misc Topics
20 min
Beginner
Video
Theory
This video covers another way to compute symbolic gains, the difference between having the P gain act on the error or just the feedback, extending bandwidt...
See More
Computing the DFT Matrix
7 min
Beginner
Video
Theory
This video discusses how to compute the Discrete Fourier Transform (DFT) matrix in Matlab and Python. In practice, the DFT should usually be computed using the fast Fourier transform (FFT)...
See More
Standard HW Problem #2: Which is the real open loop transfer function?
13 min
Beginner
Video
Theory
In this video, we’ll go through another standard homework problem so you can see how you can apply many of the things you’re learning into a single problem. The question is, we have two...
See More
Derivation of the Heat Equation
31 min
Beginner
Video
Theory
In this video, we derive the heat equation. This partial differential equation (PDE) applies to scenarios such as the transfer of heat in a uniform, homogen...
See More
Designing a Lead Compensator with Bode Plot
14 min
Beginner
Video
Theory
This video walks through a phase lead compensator example using the Bode Plot method.
See More
Lecture 16: More on Root Locus and Gain Compensation
43 min
Beginner
Video
Theory

Frequency domain – tutorial 2: Fourier series
25 min
Beginner
Video
Theory
In this video, we learn Fourier series which enables us to travel from time to the frequency domain when a signal is periodic. The following materials are co...
See More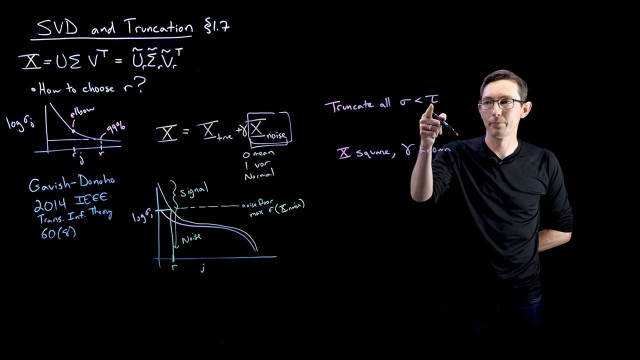
SVD and Optimal Truncation
11 min
Intermediate
Video
Theory
This video describes how to truncate the singular value decomposition (SVD) for matrix approximation.
See More
Posicast Control 4 - ( In English )
12 min
Beginner
Video
Theory
This video continues to explore the gantry crame control simulations in open-loop- The main focus is the half-cycle Posicast.
See More
Lecture 20: PID and Lag-Lead Compensator Design using Root Locus
74 min
Beginner
Video
Theory

Time domain - tutorial 1: what is signal processing?
1 min
Beginner
Video
Theory
In this video, we review the concept of signal processing and why it is useful to learn it. Learn Signal Processing 101 in 31 lectures covering time, frequen...
See More
Process Control Introduction
14 min
Beginner
Video
Theory
An overview on state variables, inputs (manipulated and disturbance variables), outputs (measured state variables), and an example on the balance equations w...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 10 - Policy G...
81 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

IMC based PID Design for a First Order Process
8 min
Beginner
Video
Theory
IMC based PID Design for a First Order Process
See More![Stability and Eigenvalues [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_289.jpg?itok=dbD4O7ru)
Stability and Eigenvalues [Control Bootcamp]
19 min
Beginner
Video
Theory
Here we discuss the stability of a linear system (in continuous-time or discrete-time) in terms of eigenvalues. Later, we will actively modify these eigenvalues, and hence the dynamics...
See More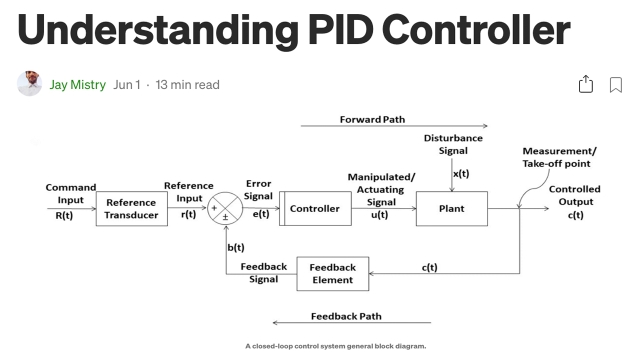
Understanding PID Controller
13 min
Beginner
Article / Blog
Theory
This blog post begins by walking through the basics and the theoretical part of the PID controllers. The controller is then tested, verified, and analyzed using MATLAB.
See More
Working with Synthetic Data | Deep Learning for Engineers, Part 2
18 min
Beginner
Video
Theory
This video covers the first step in deep learning: having access to data. Part of making the decision of whether deep learning is right for your project comes down to the type and amount of...
See More![Degrees of Controllability and Gramians [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_305.jpg?itok=6ZkiWCDa)
Degrees of Controllability and Gramians [Control Bootcamp]
15 min
Beginner
Video
Theory
This lecture discusses degrees of controllability using the controllability Gramian and the singular value decomposition of the controllability matrix.
See More