

Z-Transform - Practical Applications
26 min
Intermediate
Video
Application
Covering practical applications of the Z-transform used in digital signal processing, for example, stability analysis and frequency response of discrete-time systems. Theory, C code, and...
See More
Advances in feedforward control for measurable disturbances
35 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More
System Identification: Koopman with Control
10 min
Intermediate
Video
Theory
This lecture provides an overview of the use of modern Koopman spectral theory for nonlinear control. In particular, we develop control in a coordinate system defined by eigenfunctions of...
See More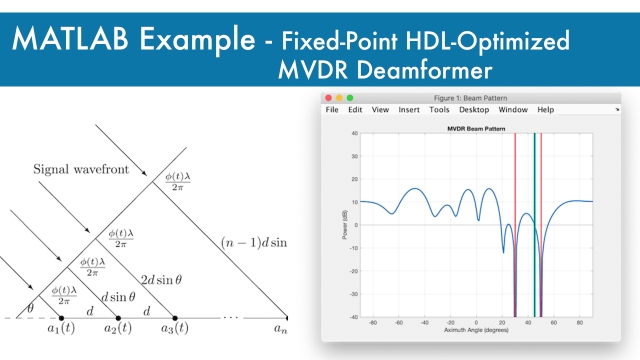
Fixed-Point HDL-Optimized Minimum-Variance Distortionless-Response (MVDR) Be...
Intermediate
Example
Application
This example shows how to implement a fixed-point HDL-optimized minimum-variance distortionless-response (MVDR) beamformer in MATLAB.
See More
Radar Systems Engineering MATLAB Documentation and Examples
Intermediate
Example
Theory
The functions in this section give you the MATLAB tools needed to evaluate the performance of a radar system. You can use the radar equation to evaluate the radar received signal-to-noise...
See More
Why Choose Model-Based Reinforcement Learning?
15 min
Intermediate
Video
Theory
What is the difference between model-free and model-based reinforcement learning? Explore the differences and results as the learning models are applied to balancing a cart/pole system as an...
See More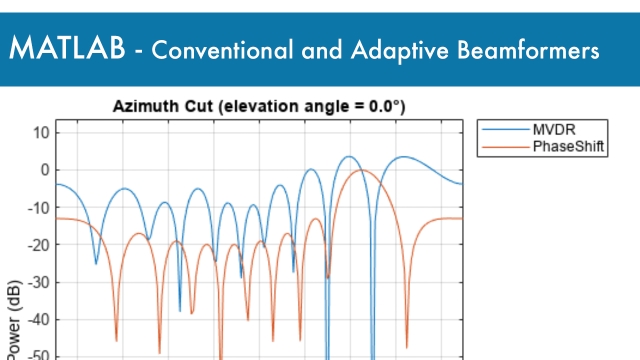
Conventional and Adaptive Beamformers
Intermediate
Example
Application
This example illustrates how to apply digital beamforming to a narrowband signal received by an antenna array. Three beamforming algorithms are illustrated: the phase shift beamformer...
See More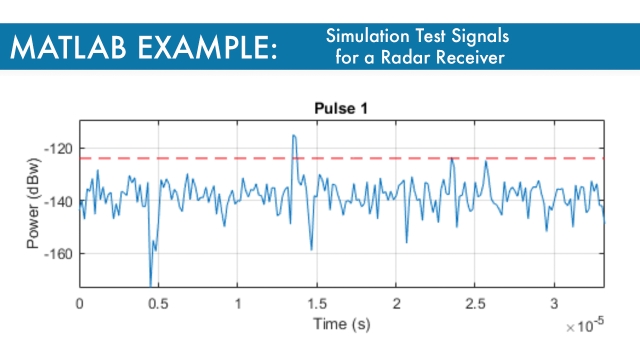
Simulating Test Signals for a Radar Receiver
Intermediate
Example
Application
This example shows how to simulate received signal of a monostatic pulse radar to estimate the target range. A monostatic radar has the transmitter collocated with the receiver. The...
See More
Creating Discrete-Time Models
Intermediate
Example
Theory
This MATLAB example shows how to create discrete-time linear models using the tf, zpk, ss, and frd commands.
")
Koopman Spectral Analysis (Control)
15 min
Intermediate
Video
Theory
In this video, we explore extensions of Koopman theory for control systems. Much of the excitement and promise of Koopman operator theory is centered around the ability to represent...
See More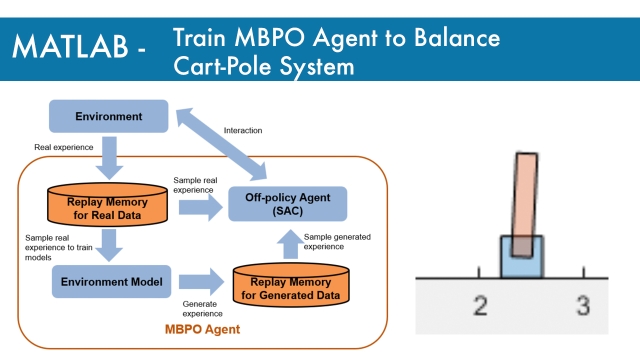
MATLAB Example: Train MBPO Agent to Balance Cart-Pole System
Intermediate
Example
Demonstration
This example shows how to train a model-based policy optimization (MBPO) agent to balance a cart-pole system modeled in MATLAB. For more information on MBPO agents, see Model-Based Policy...
See More
Data-Driven Dynamical Systems Overview
21 min
Intermediate
Video
Theory
This video provides a high-level overview of this new series on data-driven dynamical systems. In particular, we explore the various challenges in modern dynamical systems, along with...
See More
Advances in feedforward control for measurable disturbances (in Spanish)
60 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More
Vibrational Control in Insect Flight
7 min
Intermediate
Video
Application
Abstract: It is generally accepted among biology and engineering communities that insects are unstable at hover. However, existing approaches that rely on direct averaging do not fully...
See More
Why Digital Beamforming Is Useful for Radar
13 min
Intermediate
Video
Theory
Learn how you can use digital beamformers to improve the performance and functions of radar systems. The MATLAB Tech Talk series on radar covered how to use radar to determine range, range...
See More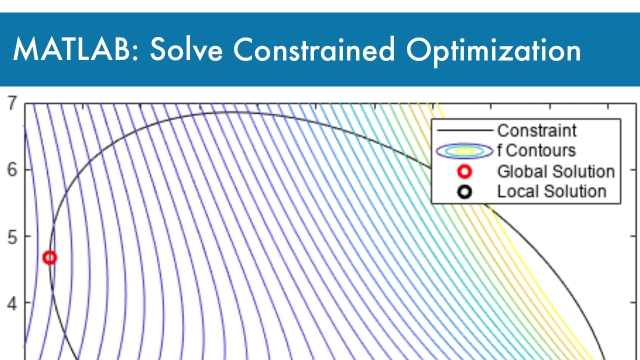
MATLAB Example: Solve Constrained Nonlinear Optimization, Problem-Based
Intermediate
Example
Theory
This example shows how to find the minimum of a nonlinear objective function with a nonlinear constraint by using the problem-based approach.
See More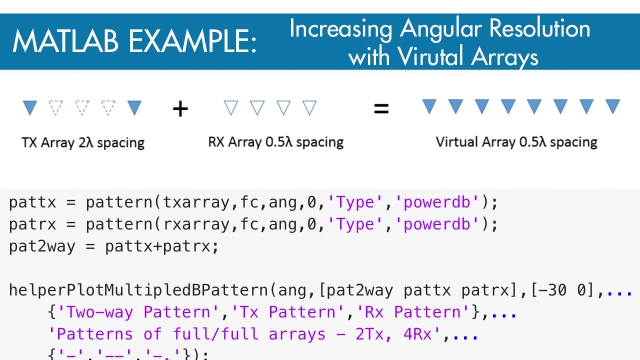
Increasing Angular Resolution with Virtual Arrays
Intermediate
Example
Application
This MATLAB example introduces how forming a virtual array in MIMO radars can help increase angular resolution. It shows how to simulate a coherent MIMO radar signal processing chain using...
See More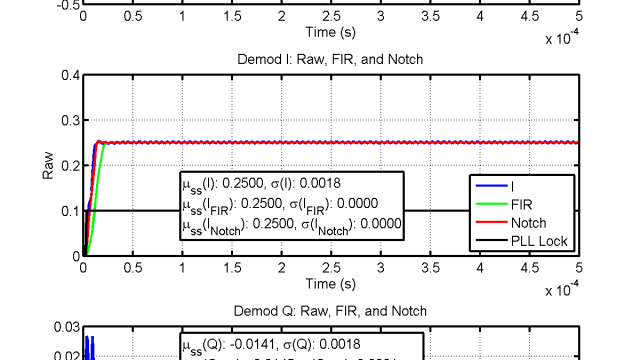
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modul...
47 min
Intermediate
Video
Theory
Video talk of the paper by the same name.
See More
Why the Riccati Equation Is important for LQR Control
14 min
Intermediate
Video
Theory
This Tech Talk looks at an optimal controller called linear quadratic regulator, or LQR, and shows why the Riccati equation plays such an important role in solving it efficiently. The talk...
See More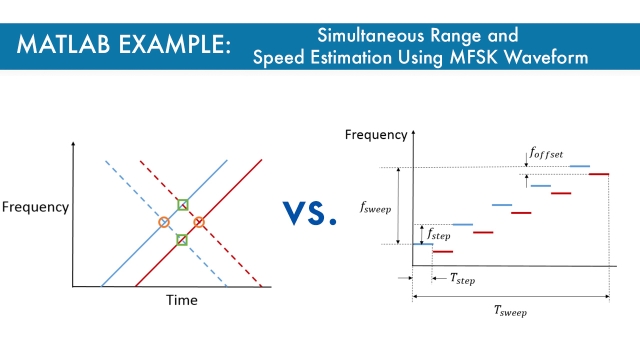
Simultaneous Range and Speed Estimation Using MFSK Waveform
Intermediate
Example
Application
This MATLAB example compares triangle sweep frequency-modulated continuous (FMCW) and multiple frequency-shift keying (MFSK) waveforms used for simultaneous range and speed estimation for...
See More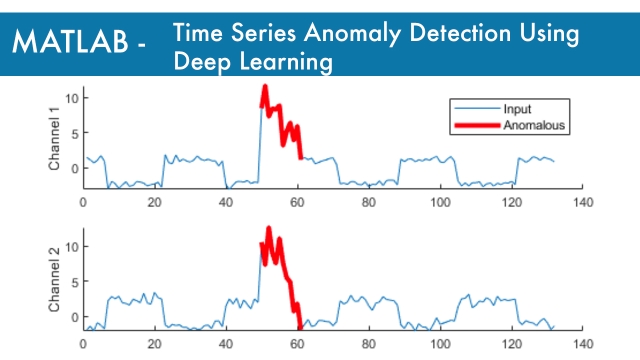
Time Series Anomaly Detection Using Deep Learning
Intermediate
Example
Demonstration
This example shows how to detect anomalies in sequence or time series data.
To detect anomalies or anomalous regions in a collection of sequences or time series data, you can use an...
See More
How Antennas Work
8 min
Intermediate
Video
Theory
Antennas constitute as a major component in various communication systems, signal transmission and many others. It is important to understand how they work and create propagating waves in...
See More
Wind Tunnel Testing: Introduction and Data Acquisition
28 min
Intermediate
Video
Theory
This is the first of our 3 part series on wind tunnel testing. In this video, we introduce the concept of wind tunnel testing as well as discuss the process for acquiring aerodynamic data in...
See More
A Tutorial on PES Pareto Methods for Analysis of Noise Propagation in Feedba...
48 min
Intermediate
Video
Theory
This is the recorded talk of the paper by the same title.
See More
Train Custom LQR Agent with MATLAB
Intermediate
Example
Application
This example shows how to train a custom linear quadratic regulation (LQR) agent to control a discrete-time linear system modeled in MATLAB®.
See More