

")
Frequency domain – tutorial 3: filtering (periodic signals)
13 min
Beginner
Video
Theory
In this video, we learn about filtering which enables us to manipulate the frequency content of a signal. A common filtering application is to preserve desi...
See More![Controllability [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_301.jpg?itok=H78kwaJN)
Controllability [Control Bootcamp]
32 min
Beginner
Video
Theory
This lecture explores when a linear system is controllable. We begin with the simple test in terms of the rank of the controllability matrix on a few intuitive examples.
See More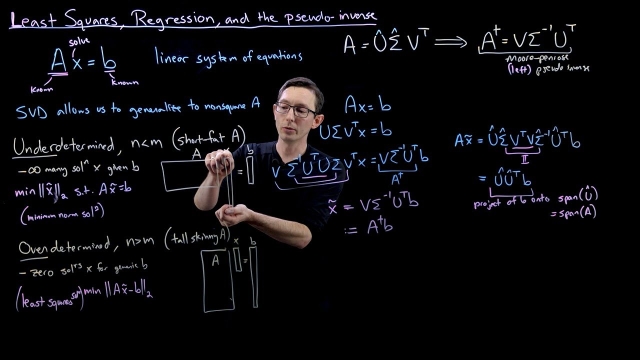
Least Squares Regression and the SVD
5 min
Beginner
Video
Theory
This video describes how the SVD can be used to solve linear systems of equations. In particular, it is possible to solve nonsquare systems (overdetermined or underdetermined) via least...
See More
Peter Ponders PID - Simulation Methods, Which is Best?
22 min
Beginner
Video
Theory

Machine Learning Control: Tuning a PID Controller with Genetic Algorithms
16 min
Beginner
Video
Theory
This lecture shows how to use genetic algorithms to tune the parameters of a PID controller. Tuning a PID controller with genetic algorithms is not generally recommended, but is used to...
See More
Closed Loop Feedback Control
13 min
Beginner
Video
Theory
Intro to closed loop (feedback) control motivation, theory, block diagrams and block diagram algebra, and PID controllers
See More
Peter Ponders PID - System Identification Basics
11 min
Beginner
Video
Theory

Neural Network Architectures
9 min
Beginner
Video
Theory
This lecture describes the wide variety of neural network architectures available to solve various problems.
See More
Bode Plot Gain and Phase Margin Determination
5 min
Beginner
Video
Theory
I'll show you how we can determine the Gain and Phase Margin from a Bode Plot (at some fixed controller gain).
See More
")
Introduction to the Fourier Transform (Part 2)
12 min
Beginner
Video
Theory
This video is the second part of the introduction to the Fourier Transform. I address an error that I made in the first video concerning the scaling term of the transform. I also try to...
See More
Standard HW Problem #1: PID and Root Locus
18 min
Beginner
Video
Theory
A walk through of a typical homework problem using the root locus method to tune a PID controller. This is the first in what may be a series of homework style problems I'll cover. This is...
See More
The Taylor Series
84 min
Beginner
Video
Theory
In this video we discuss the Taylor Series (and the closely related Maclaurin Series). These are two specific types of Power Series that allow you to approx...
See More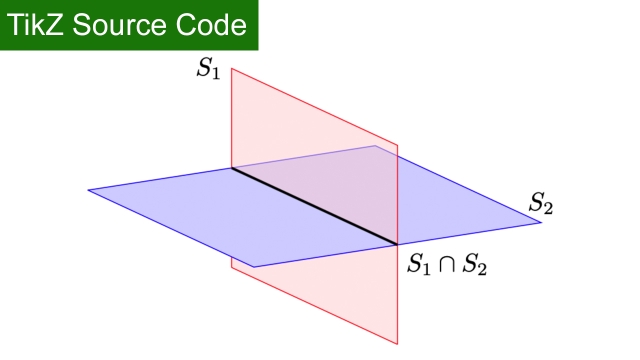
TikZ source Code: Switching Manifold
Beginner
Source Code
Application
TikZ source Code: Switching Manifold
See More
Lecture 13: Stability and Routh Hurwitz criterion
31 min
Beginner
Video
Theory
")
How to Land on a Planet (and how it'll be done in the future!)
15 min
Beginner
Video
Theory
This video covers the basic ideas behind how engineers develop the algorithms that allow autonomous robots to land on other planetary bodies.
See More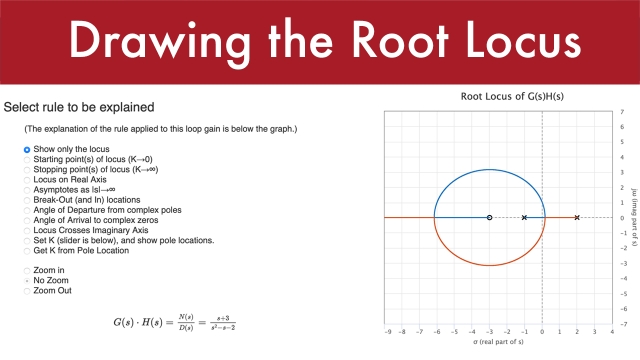
Drawing the root locus (Interactive Tool)
Beginner
App
Theory
This page was developed to help student learn how to sketch the root locus by hand. You can enter a numerator and denominator for G(s)H(s) (i.e., the loop gain) and the program will guide...
See More
Lecture 15: Root Locus
53 min
Beginner
Video
Theory

Routh-Hurwitz Criterion, Special Cases
13 min
Beginner
Video
Theory
This video presents two special cases that you can encounter when filling out the Routh Array. The first case is when there is a zero in a row with at least one non-zero element following...
See More
Understanding Sensor Fusion and Tracking, Part 1: What Is Sensor Fusion?
12 min
Beginner
Video
Theory
This video provides an overview of what sensor fusion is and how it helps in the design of autonomous systems. It also covers a few scenarios that illustrate the various ways that sensor...
See More
Understanding and Sketching the Root Locus
176 min
Beginner
Video
Theory
In this video we discuss how to sketch the root locus for a system by developing a series of 5 core rules augmented by 5 supplemental rules (for a total of 1...
See More
Posicast Control 4 - ( In English )
12 min
Beginner
Video
Theory
This video continues to explore the gantry crame control simulations in open-loop- The main focus is the half-cycle Posicast.
See More
Standard HW Problem #2: Which is the real open loop transfer function?
13 min
Beginner
Video
Theory
In this video, we’ll go through another standard homework problem so you can see how you can apply many of the things you’re learning into a single problem. The question is, we have two...
See More
Solving the 1D Wave Equation
118 min
Beginner
Video
Theory
In this video, we solve the 1D wave equation. We utilize the separation of variables method to solve this 2nd order, linear, homogeneous, partial differenti...
See More
Lecture 14: Routh Hurwitz Criterion
22 min
Beginner
Video
Theory