

![SVD: Image Compression [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_419.jpg?itok=wbEekwkx)
SVD: Image Compression [Matlab]
14 min
Beginner
Video
Application
This video describes how to use the singular value decomposition (SVD) for image compression in Matlab.
See More
Frequency domain – tutorial 8: frequency spectra
9 min
Beginner
Video
Theory
In this video, we learn about frequency spectra which can be divided into two parts: phase and magnitude spectrum. Some examples will be provided to practice...
See More
Lecture 27: Lead Compensator Design using Bode plots
70 min
Beginner
Video
Theory

Frequency domain – tutorial 11: equalization
11 min
Beginner
Video
Theory
In this video, we learn about equalization technique which is used in communication systems to compensate for the destructive effect of the channel between t...
See More
Why Transfer Functions Matter
5 min
Beginner
Video
Theory
Once we know a process's transfer function we can model how it will respond to an variety of inputs very easily, check it out.
See More
Feedforward Control Introduction
6 min
Beginner
Video
Theory
I introduce feedforward control (FFC) and describe how it can be used to minimize the difference between an output's setpoint and measured value (the error o...
See More
Machine Learning Course by Andrew Ng
1120 min
Beginner
Course
Application
A very comprehensive and detailed course in machine learning , best suited for beginners with knowledge of high school linear mathematics.
See More
Frequency Response Analysis FRA and the Amplitude Ratio and Phase Angle
12 min
Beginner
Video
Theory
Process engineers model output response to inputs that oscillate via frequency response analysis (FRA). In this video, I'll go over amplitude ratios and phas...
See More
Numerically Calculating Partial Derivatives
59 min
Beginner
Video
Theory
In this video we discuss how to calculate partial derivatives of a function using numerical techniques. In other words, these partials are calculated withou...
See More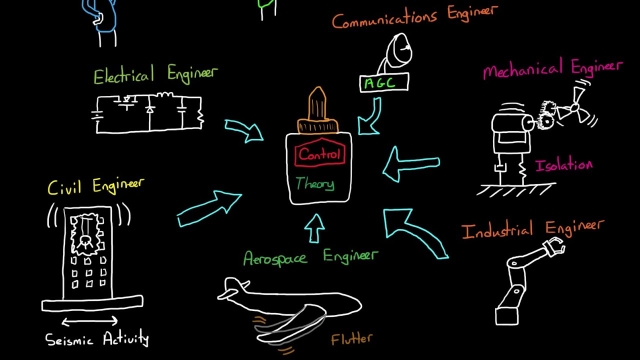
Why Learn Control Theory
5 min
Beginner
Video
Theory
In this video I present a few reasons why learning control theory is important and try to give some motivation to continue learning.
See More
Peter Ponders PID - KalmanFilters, Alpha-Beta-Gamma filters
16 min
Beginner
Video
Theory

The Inverse Laplace Transform
48 min
Beginner
Video
Theory
In this video we show how to perform the inverse Laplace transform on a signal in the Laplace domain to obtain its equivalent representation in the time doma...
See More
Discrete control #1: Introduction and overview
22 min
Beginner
Video
Theory
So far I have only addressed designing control systems using the frequency domain, and only with continuous systems. That is, we’ve been working in the S domain with transfer functions. We...
See More
Understanding Sensor Fusion and Tracking, Part 3: Fusing a GPS and IMU to Es...
14 min
Beginner
Video
Theory
This video continues our discussion on using sensor fusion for positioning and localization by showing how we can use a GPS and an IMU to estimate and object’s orientation and position. We...
See More
Peter Ponders PID - System Identification Advanced
19 min
Beginner
Video
Theory

Understanding and Sketching Individual Bode Plot Components
148 min
Beginner
Video
Theory
In this video we illustrate how 7 types of simple transfer functions contribute to a bode plot. We refer to these as ‘components’ and will cover the followi...
See More
Control Bootcamp: Benefits of Feedback on Cruise Control Example (Part 2)
11 min
Beginner
Video
Theory
Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise control example. (Part 2)
See More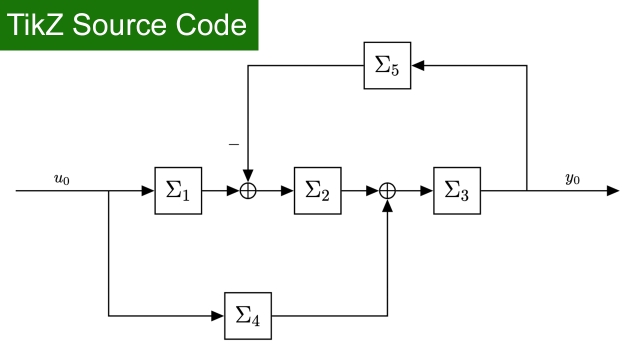
TikZ source Code: Nested subsystems
Beginner
Source Code
Application
TikZ source Code: Nested subsystems
See More")
Introduction to the Fourier Transform (Part 1)
13 min
Beginner
Video
Theory
This video is an introduction to the Fourier Transform. I try to give a little bit of background into what the transform does and then I go step by step through explaining the Inverse...
See More
Control Bootcamp: Laplace Transforms and the Transfer Function
19 min
Beginner
Video
Theory
Here we show how to compute the transfer function using the Laplace transform.
See More
Deriving Percent Overshoot, Settling Time, and Other Performance Metrics
59 min
Beginner
Video
Theory
In this video we examine a second order dynamic system and derive how various performance metrics (such as time to first peak, magnitude at first peak, perce...
See More
Designing a Lead Compensator with Root Locus
13 min
Beginner
Video
Theory
This video walks through a phase lead compensator example using the Root Locus method.
See More
Derivation of the Heat Equation
31 min
Beginner
Video
Theory
In this video, we derive the heat equation. This partial differential equation (PDE) applies to scenarios such as the transfer of heat in a uniform, homogen...
See More
Lecture 12: Steady state error
26 min
Beginner
Video
Theory
")
Control Bootcamp: Linear Quadratic Gaussian (LQG)
8 min
Beginner
Video
Theory
This lecture combines the optimal full-state feedback (e.g., LQR) with the optimal full-state estimator (e.g., LQE or Kalman Filter) to obtain the sensor-based linear quadratic Gaussian (LQG...
See More