

Bode Plots by Hand: Real Poles or Zeros
13 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More![Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_431.jpg?itok=vs89WnA2 "Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]")
Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart...
13 min
Beginner
Video
Theory
Here we design an optimal full-state feedback controller for the inverted pendulum on a cart example using the linear quadratic regulator (LQR). In Matlab, we find that this is a simple one...
See More
Peter Ponders PID - InputShaping
21 min
Beginner
Video
Theory
Project Based Engineering Instrumentation with CircuitPython
Beginner
Book
Application
This textbook has been designed with the student and faculty member in mind. First, this textbook goes hand in hand with Engineering Instrumentation taught at the undergraduate level at many...
See More
Laplace domain – tutorial 3: Laplace transform tables
17 min
Beginner
Video
Theory
In this video, we cover Laplace transform tables which help us to quickly find Laplace and inverse Laplace transforms. The main learning objective is to full...
See More
Digital Twins
8 min
Beginner
Video
Theory
This lecture discusses the use of data-driven digital twins in advanced model-based design and engineering, and the related digital thread, which ties together the data throughout an entire...
See More
Machine Learning Control: Genetic Programming Control
10 min
Beginner
Video
Theory
This lecture discusses the use of genetic programming to manipulate turbulent fluid dynamics in experimental flow control.
See More
Peter Ponders PID - Root Locus Is Useless
25 min
Beginner
Video
Theory

Inputs and Outputs as defined by a Process Control Engineer
7 min
Beginner
Video
Theory
Defining process inputs and outputs is a lot more complicated than I initially thought when I was learning about process control. In this video, I share how ...
See More
Overview of Dempster-Shafer Theory (Evidence Theory)
Beginner
Article / Blog
Theory
This is an overview of Dempster-Shafer Theory (Evidence Theory) that provides an introduction, definition, basic information about combination rules, some issues with the theory, and the...
See More
Control Bootcamp: Benefits of Feedback on Cruise Control Example
14 min
Beginner
Video
Theory
Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise control example.
See More
Understanding Model Predictive Control, Part 6: How to Design an MPC Control...
9 min
Beginner
Video
Theory
Learn how to design an MPC controller for an autonomous vehicle steering system using Model Predictive Control Toolbox™. This video walks you through the design process of an MPC controller...
See More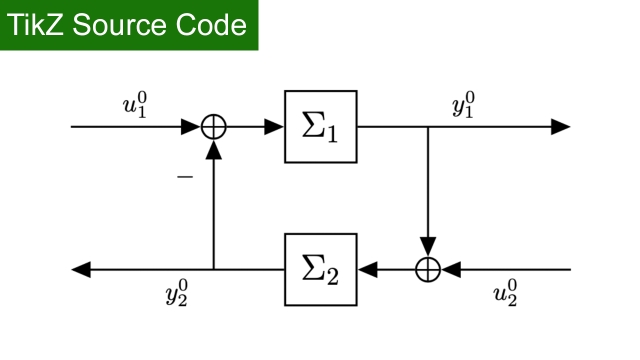
TikZ source Code: Two systems in negative feedback
Beginner
Source Code
Application
TikZ source Code: Two systems in negative feedback
See More

Fourier Series: Part 2
6 min
Beginner
Video
Theory
This video will show how to approximate a function with a Fourier series, which is an infinite sum of sines and cosines. We will discuss how these sines and cosines form a basis for the...
See More
PID Control - A brief introduction
7 min
Beginner
Video
Theory
In this video, I introduce the topic of PID control. This is a short introduction design to prepare you for the next few lectures where I will go through several examples of PID control....
See More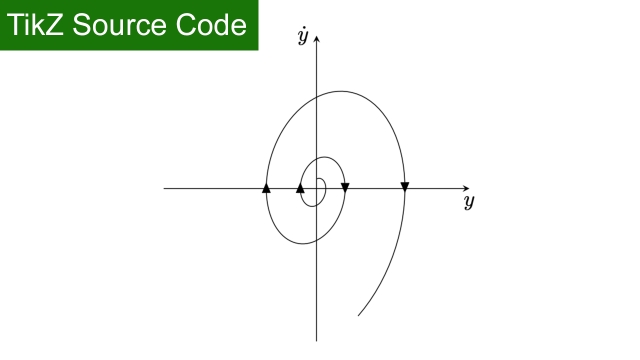
TikZ source Code: Sliding Mode Control Example System 2
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 2
See More
Transfer Function to State Space
56 min
Beginner
Video
Theory
In this video we show how to transform a transfer function to an equivalent state space representation. We will derive various transformations such as contr...
See More
Lecture 11: Transient Response and Numerical Problems
30 min
Beginner
Video
Theory

Manipulating Aerodynamic Coefficients
25 min
Beginner
Video
Theory
In this video we discuss some potential problems you may encounter when attempting to perform operations with dimensionless aerodynamic coefficients such as ...
See More
Lecture 22: Frequency domain specifications for Second order system
39 min
Beginner
Video
Theory

Routh-Hurwitz Criterion, An Introduction
12 min
Beginner
Video
Theory
This video gives an introduction into the Routh-Hurwitz Criterion and the Routh Array. I also present a little background information in order to emphasize why the method was developed and...
See More
Designing a PID Controller Using the Root Locus Method
63 min
Beginner
Video
Theory
In this video we discuss how to use the root locus method to design a PID controller. In addition to discussing the theory, we look at Matlab tools to enabl...
See More
Lecture 23: Bode plots
48 min
Beginner
Video
Theory

Relationship Between Poles and Performance of a Dynamic System
43 min
Beginner
Video
Theory
In this video we establish the relationship between pole locations and associated performance of a dynamic system. This relationship is useful to translate ...
See More