


PID Control - A brief introduction
7 min
Beginner
Video
Theory
In this video, I introduce the topic of PID control. This is a short introduction design to prepare you for the next few lectures where I will go through several examples of PID control....
See More
Trimming a Model of a Dynamic System Using Numerical Optimization
60 min
Beginner
Video
Theory
In this video we show how to find a trim point of a dynamic system using numerical optimization techniques. We generate a cost function that corresponds to ...
See More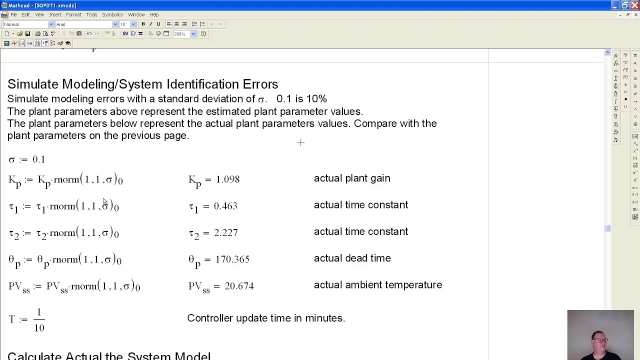
Peter Ponders PID. Second Order Plus Dead Time , SOPDT, Temperature Control,...
12 min
Beginner
Video
Theory
In this video I derive the equations for the controller gains and a low pass filter for a SOPDT system with a very long dead time To make the simulation mo...
See More
Lecture 31: Time response, Controllability and Observability
33 min
Beginner
Video
Theory

Controllability of a Linear System: The Controllability Matrix and the PBH T...
97 min
Beginner
Video
Theory
In this video we explore controllability of a linear system. We discuss two methods to test for controllability, the controllability matrix as well as the P...
See More
Peter Ponders PID - Tank Level Control
20 min
Beginner
Video
Theory

Lecture 19: Lead and PD compensator Design using Root Locus
54 min
Beginner
Video
Theory

Routh-Hurwitz Criterion, Beyond Stability
11 min
Beginner
Video
Theory
This video explains of few uses of the Routh-Hurwitz Criterion that go beyond simply determining how many poles exist in the right half plane. I cover how to determine gain margin and how...
See More
Transfer Functions: Introduction and Implementation
53 min
Beginner
Video
Theory
In this video we introduce transfer functions and show how they can be derived from a set of linear, ordinary differential equations. We also examine how to...
See More
Control Bootcamp: Laplace Transforms and the Transfer Function
19 min
Beginner
Video
Theory
Here we show how to compute the transfer function using the Laplace transform.
See More
Introduction to Partial Differential Equations
52 min
Beginner
Video
Theory
This is the first lesson in a multi-video discussion focused on partial differential equations (PDEs).In this video we introduce PDEs and compare them with o...
See More
Time domain - tutorial 4: transformation examples
5 min
Beginner
Video
Theory
In this video, we solve examples to practice different signal transformations using a systematic approach. By the end of this lecture, you should be able to ...
See More
Machine Learning Control: Genetic Programming
12 min
Beginner
Video
Theory
This lecture explores the use of genetic programming to simultaneously optimize the structure and parameters of an effective control law.
See More
Laplace domain – tutorial 6: Transfer function & system properties
24 min
Beginner
Video
Theory
In this video, we learn about transfer function and system properties. The following materials are covered:1) what is a transfer function?2) relation between...
See More
Bode Plots by Hand: Real Poles or Zeros
13 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More
Understanding Model Predictive Control, Part 5: How To Run MPC Faster
7 min
Beginner
Video
Theory
This video starts by providing quick tips for implementing MPC for fast applications. If you need to further decrease the sample time for your fast applications, you can use explicit MPC...
See More
IMC PID Design of a Second Order Process
8 min
Beginner
Video
Theory
IMC PID Design of a Second Order Process
See More
Second Order Dynamics
3 min
Beginner
Video
Theory
A crash course overview on second order dynamics in the frequency domain, what the key parameters are, and why they matter.
See More
Drone Simulation and Control, Part 5: Tuning the PID controller
14 min
Beginner
Video
Theory
In the last video, we learned how accurate, nonlinear models are great for simulation but they don’t lend themselves well to linear analysis and design. This video takes the nonlinear model...
See More
Equations of Motion for a Planar Vehicle
43 min
Beginner
Video
Theory
In this video we outline equations of motion for a simple planar vehicle. This model is suitable for vehicles such as boats or hovercraft that that are rest...
See More![Motivation for Full-State Estimation [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_378.jpg?itok=AFDlS2AH "Motivation for Full-State Estimation [Control Bootcamp]")
Motivation for Full-State Estimation [Control Bootcamp]
11 min
Beginner
Video
Theory
This video discusses the need for full-state estimation. In particular, if we want to use full-state feedback (e.g., LQR), but only have limited measurements of the system, it is necessary...
See More
Understanding PID Control, Part 3: Expanding Beyond a Simple Derivative
11 min
Beginner
Video
Theory
This video describes how to make an ideal PID controller more robust when controlling real systems that don’t behave like ideal linear models. Noise is generated by sensors and is present in...
See More
Using a Homogeneous Transformation Matrix to Combine Rotation and Translatio...
63 min
Beginner
Video
Theory
In this video we discuss how to properly deal with coordinate frames that are both rotated and translated from one another. We develop a homogeneous transfo...
See More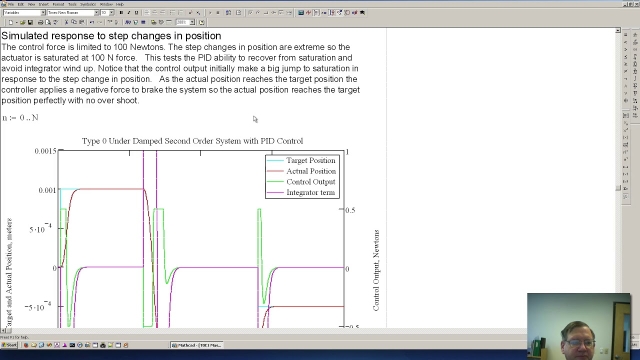
Peter Ponders PID - Controlling an Under Damp Mass and Spring System
24 min
Beginner
Video
Theory
Demonstrates:How to calculate the PID gains. The importance of the derivative gain. How to simulate the mass and spring systemControl limitations based on s...
See More
Lecture 18: PI and Lag Compensator Design using Root Locus
41 min
Beginner
Video
Theory