

Systems Engineering, Part 5: Some Benefits of Model-Based Systems Engineerin...
12 min
Beginner
Video
Theory
Learn how model-based systems engineering (MBSE) can help you cut through the chaos of early systems development and get you from definition to execution more seamlessly.
You’ll hear the...
See More
Computer Aids for Chemical Engineering
Beginner
Article / Blog
Theory
A curated list of resources for Chemical Engineering students. The resources include syllabi, schedules, course notes, textbooks, screencasts, software, hardware, and other useful links.
See More
Understanding Control Systems (Playlist)
Beginner
Video
Theory
Learn the basic concepts behind controls systems. Walk through everyday examples that outline fundamental ideas, and explore open-loop and feedback control systems. These videos explore open...
See More
Solving Systems of Equations Using the Optimization Penalty Method
44 min
Beginner
Video
Theory
In this video we show how to solve a system of equations using numerical optimization instead of analytically solving. We show that this can be applied to e...
See More
Reinforcement Learning for Engineers, Part 5: Overcoming the Practical Chall...
16 min
Beginner
Video
Theory
This video addresses a few challenges that occur when using reinforcement learning for production systems and provides some ways to mitigate them. Even if there aren’t straightforward ways...
See More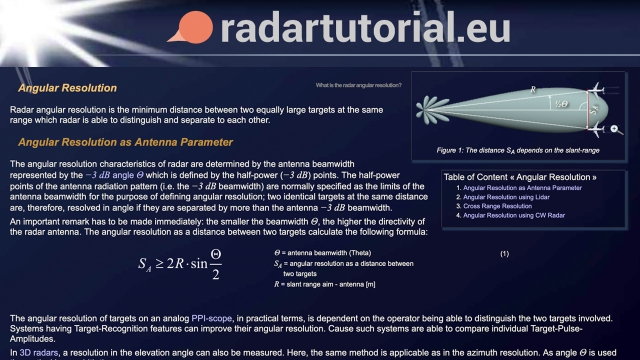
Radar Angular Resolution
Beginner
Article / Blog
Theory
This radartutorial.eu page describes angular resolution. Radar angular resolution is the minimum distance between two equally large targets at the same range which radar is able to...
See More![The Kalman Filter [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_382.jpg?itok=BhYaUiZA "The Kalman Filter [Control Bootcamp]")
The Kalman Filter [Control Bootcamp]
6 min
Beginner
Video
Theory
Here, we discuss the Kalman Filter, which is an optimal full-state estimator, given Gaussian white noise disturbances and measurement noise.
See More
System Identification: Sparse Nonlinear Models with Control
8 min
Beginner
Video
Theory
This lecture explores an extension of the sparse identification of nonlinear dynamics (SINDy) algorithm to include inputs and control. The resulting SINDY with control (SINDYc) can be used...
See More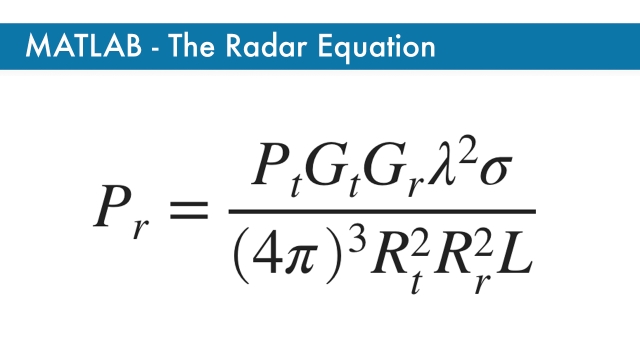
Matlab: The Radar Equation
Beginner
Article / Blog
Theory
This Mathworks page explains the parameters of the radar range equation. The point target radar range equation estimates the power at the input to the receiver for a target of a given radar...
See More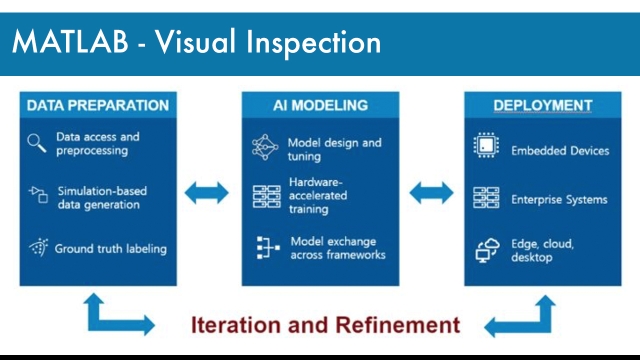
MATLAB Discovery Page - Visual Inspection
Beginner
Article / Blog
Theory
Visual inspection is the image-based inspection of parts where a camera scans the part under test for both failures and quality defects. Automated inspection and defect detection are...
See More
Passivity-Based Control to Guarantee Stability | Control Systems in Practice...
15 min
Beginner
Video
Theory
Learn about passivity-based control to guarantee closed-loop stability of feedback systems. Consider different ways to assess the stability of systems other than looking at gain and phase...
See More
Why is a Chirp Signal used in Radar?
7 min
Beginner
Video
Theory
Gives an intuitive explanation of why the Chirp signal is a good compromise between an impulse waveform and a sinusoidal pulse waveform for radar.
See More
Sending digital information over a wire | Networking tutorial (1 of 13)
4 min
Beginner
Video
Theory
This video lecture is the beginning of an exploration of computer networking with the basics of sending digital information with a copper wire.

Machine Learning Control: Overview
10 min
Beginner
Video
Theory
This lecture provides an overview of how to use machine learning optimization directly to design control laws, without the need for a model of the dynamics.
See More
Control System Lectures - Bode Plots, Introduction
12 min
Beginner
Video
Theory
This lecture is an introduction to frequency response methods, and in particular describes the Bode plot. I go through how it is generated and why we use it to visualize the frequency...
See More
Model Reference Adaptive Control Part-1
60 min
Beginner
Video
Theory
Video course on nonlinear and adaptive control by Dr. Shubhendu Bhasin, Department of Electrical Engineering, IIT Delhi.
See More
Intro to Data Science: What is Data Science?
8 min
Beginner
Video
Theory
This lecture provides an overview of the various components of data science, including data collection, cleaning, and curation, along with visualization, analysis, and machine learning (i.e...
See More
Computing Euler Angles: Tracking Attitude Using Quaternions
74 min
Beginner
Video
Theory
In this video we continue our discussion on how to track the attitude of a body in space using quaternions. The quaternion method is similar to the Euler Ki...
See More")
Robotic Car - How to read Gyro Datasheets (Part 2)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this second part I explain the purpose of a buffer for a MEMS gyro and explain...
See More
Autonomous Navigation, Part 1: What is Autonomous Navigation?
11 min
Beginner
Video
Theory
Navigation is the ability to determine your location within an environment and to be able to figure out a path that will take you to a goal. This video provides an overview of how we get a...
See More
What are Phased Arrays?
17 min
Beginner
Video
Theory
This video introduces the concept of phased arrays. An array refers to multiple sensors, arranged in some configuration, that act together to produce a desired sensor pattern. With a phased...
See More
Regulatory PID (Polish)
18 min
Beginner
Video
Theory
W tym odcinku, opisze wam podstawy działania regulatorów PID.
See More
Machine Learning: What is easy, medium, and hard?
38 min
Beginner
Video
Theory
This video gives a brief overview of what is easy, medium, and hard in machine learning, explored through case studies. Progress in machine learning is rapidly advancing, and changing the...
See More
Model Identification and Adaptive Control - From Windsurfing to Telecommunic...
Beginner
Book
Theory
This book is based on a workshop entitled: "Model Identification and Adaptive Control: From Windsurfing to Telecommunications" held in Sydney, Australia, on December 16, 2000. The workshop...
See More
Control Bootcamp: Cautionary Tale About Inverting the Plant Dynamics
5 min
Beginner
Video
Theory
Here we show an example of why it can be a very bad idea to invert some plant dynamics, for example with unstable eigenvalues, for loop shaping.
See More