


Fourier Analysis: Overview
7 min
Beginner
Video
Theory
This video presents an overview of the Fourier Transform, which is one of the most important transformations in all of mathematical physics and engineering. This series will introduce the...
See More
The Routh-Hurwitz Stability Criterion
82 min
Beginner
Video
Theory
In this video we explore the Routh Hurwitz Stability Criterion and investigate how it can be applied to control systems engineering. The Routh Hurwitz Stabi...
See More
Lecture 11: Transient Response and Numerical Problems
30 min
Beginner
Video
Theory

Understanding The Sensitivity Function
13 min
Beginner
Video
Theory
In this video I explain the sensitivity function and try to demystify the equation used to solve for the nominal sensitivity peak. Sensitivity describes how much process variations affect...
See More
Relationship Between Poles and Performance of a Dynamic System
43 min
Beginner
Video
Theory
In this video we establish the relationship between pole locations and associated performance of a dynamic system. This relationship is useful to translate ...
See More
Peter Ponders PID - InputShaping
21 min
Beginner
Video
Theory

Lecture 22: Frequency domain specifications for Second order system
39 min
Beginner
Video
Theory

Control Systems Lectures - Transfer Functions
11 min
Beginner
Video
Theory
This lecture describes transfer functions and how they are used to simplify modeling of dynamic systems.
See More")
Laplace domain – tutorial 2: Region of Convergence (ROC)
8 min
Beginner
Video
Theory
In this video, we learn five golden rules on how to quickly find the Region of Convergence (ROC) of Laplace transform. Learn Signal Processing 101 in 31 lect...
See More
Peter Ponders PID - Root Locus Is Useless
25 min
Beginner
Video
Theory

Lecture 32: Linearisation and State Space Fundamentals
96 min
Beginner
Video
Theory

Laplace domain – tutorial 3: Laplace transform tables
17 min
Beginner
Video
Theory
In this video, we cover Laplace transform tables which help us to quickly find Laplace and inverse Laplace transforms. The main learning objective is to full...
See More
Linear Systems of Equations
10 min
Beginner
Video
Theory
This video describes linear systems of equations and when they have solutions.
See More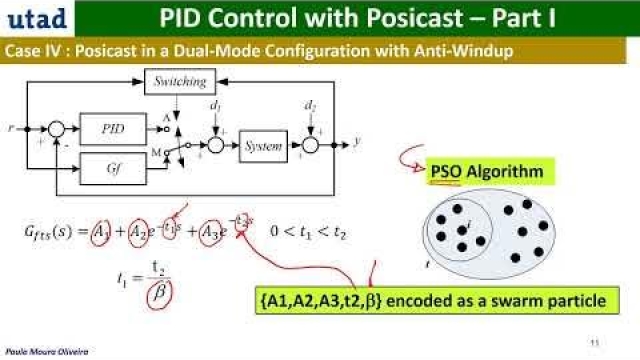
PID Control with Posicast 7 - ( In English )
12 min
Beginner
Video
Theory
In this video closed-loop configurations with PID controllers and Posicast are introduced.
See More
Cascade Control Intro
8 min
Beginner
Video
Theory
How can we improve the disturbance rejection of our controllers using additional, relevant measurements? Tune in to find out!
See More
Types of Machine Learning 2
6 min
Beginner
Video
Theory
This lecture gives an overview of the main categories of machine learning, including supervised, un-supervised, and semi-supervised techniques, depending on the availability of expert labels...
See More
Dynamic Modeling in Process Control
14 min
Beginner
Video
Theory
I'll show you how we can build the dynamic models necessary to derive process transfer functions as an introduction to process control.
See More![Controllability and the PBH Test [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_303.jpg?itok=Q45x3uZ4)
Controllability and the PBH Test [Control Bootcamp]
13 min
Beginner
Video
Theory
This video describes the PBH test for controllability and describes some of the implications for good choices of "B".
See More
Equations of Motion for a Planar Vehicle
43 min
Beginner
Video
Theory
In this video we outline equations of motion for a simple planar vehicle. This model is suitable for vehicles such as boats or hovercraft that that are rest...
See More
Standard 2nd Order ODEs: Natural Frequency and Damping Ratio
94 min
Beginner
Video
Theory
In this video we discuss writing 2nd order ODEs in standard form xdd(t)+2*zeta*wn*xd(t)+wn^2*x(t)where zeta = damping ratio wn = natural ...
See More
Drone Simulation and Control, Part 3: How to Build the Flight Code
18 min
Beginner
Video
Theory
This video describes how to create quadcopter flight software from the control architecture developed in the last video. It covers how to process the raw sensor readings and use them with...
See More
Numerically Solving Partial Differential Equations
101 min
Beginner
Video
Theory
In this video we show how to numerically solve partial differential equations by numerically approximating partial derivatives using the finite difference me...
See More")
Introduction to the Fourier Transform (Part 2)
12 min
Beginner
Video
Theory
This video is the second part of the introduction to the Fourier Transform. I address an error that I made in the first video concerning the scaling term of the transform. I also try to...
See More
Resonant Frequency of a Dynamic System
29 min
Beginner
Video
Theory
In this video we discuss the resonant frequency of a dynamic system. We show how the resonant frequency, natural frequency, and damped natural frequency are...
See More
Lecture 9: Time response and Time domain specifications
35 min
Beginner
Video
Theory