


Direct Synthesis for PID Design Intro
11 min
Beginner
Video
Theory
Direct Synthesis for PID Design Intro
See More
Control Systems in Practice, Part 6: What Are Non-Minimum Phase Systems?
14 min
Beginner
Video
Theory
We like to categorize transfer functions into groups and label them because it helps us understand how a particular system will behave simply by knowing the group that it’s part of. We gain...
See More
PID Control - A brief introduction
7 min
Beginner
Video
Theory
In this video, I introduce the topic of PID control. This is a short introduction design to prepare you for the next few lectures where I will go through several examples of PID control....
See More
Trimming a Model of a Dynamic System Using Numerical Optimization
60 min
Beginner
Video
Theory
In this video we show how to find a trim point of a dynamic system using numerical optimization techniques. We generate a cost function that corresponds to ...
See More
Fourier Series: Part 2
6 min
Beginner
Video
Theory
This video will show how to approximate a function with a Fourier series, which is an infinite sum of sines and cosines. We will discuss how these sines and cosines form a basis for the...
See More
Controllability of a Linear System: The Controllability Matrix and the PBH T...
97 min
Beginner
Video
Theory
In this video we explore controllability of a linear system. We discuss two methods to test for controllability, the controllability matrix as well as the P...
See More
Routh-Hurwitz Criterion, Beyond Stability
11 min
Beginner
Video
Theory
This video explains of few uses of the Routh-Hurwitz Criterion that go beyond simply determining how many poles exist in the right half plane. I cover how to determine gain margin and how...
See More
Lecture 5: Block Diagram Reduction
46 min
Beginner
Video
Theory

Transfer Functions: Introduction and Implementation
53 min
Beginner
Video
Theory
In this video we introduce transfer functions and show how they can be derived from a set of linear, ordinary differential equations. We also examine how to...
See More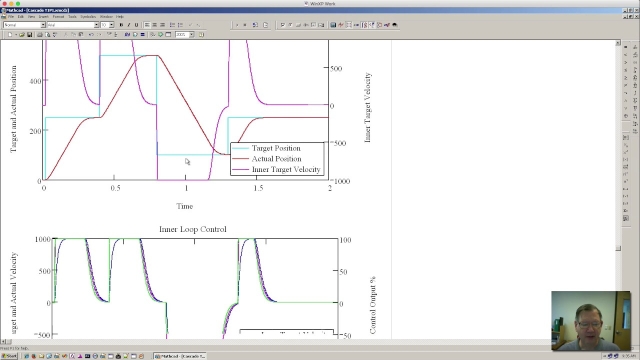
Peter Ponders PID - Cascade Control Part2
14 min
Beginner
Video
Theory
The inner loop pole locations and gains are calculated first so the inner loop pole locations are determined by the user. The outer loop poles are still pla...
See More
Lecture 3: Electrical and Mechanical System Transfer Functions
52 min
Beginner
Video
Theory

Introduction to Partial Differential Equations
52 min
Beginner
Video
Theory
This is the first lesson in a multi-video discussion focused on partial differential equations (PDEs).In this video we introduce PDEs and compare them with o...
See More with Smith Predictor")
SOPDT Sliding Mode Control ( SMC ) with Smith Predictor
6 min
Beginner
Video
Theory

Lecture 8: More on Transfer Functions
23 min
Beginner
Video
Theory

Time domain - tutorial 4: transformation examples
5 min
Beginner
Video
Theory
In this video, we solve examples to practice different signal transformations using a systematic approach. By the end of this lecture, you should be able to ...
See More
Laplace domain – tutorial 6: Transfer function & system properties
24 min
Beginner
Video
Theory
In this video, we learn about transfer function and system properties. The following materials are covered:1) what is a transfer function?2) relation between...
See More
IMC PID Design of a Second Order Process
8 min
Beginner
Video
Theory
IMC PID Design of a Second Order Process
See More
Control Bootcamp: Loop shaping
7 min
Beginner
Video
Theory
This video explores shaping the loop transfer function to have desirable sensitivity and complementary sensitivity.
See More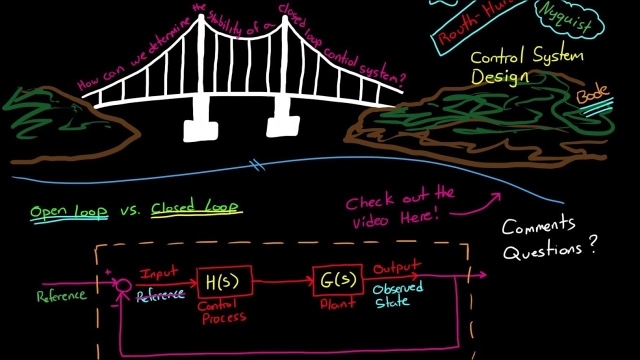
Stability of Closed Loop Control Systems
11 min
Beginner
Video
Theory
This video explains why we need design tools like the Routh-Hurwitz Criterion, Bode Plots, Nyquist Plots, and Root Locus. This is an introduction into the difficulties of determining the...
See More
Second Order Dynamics
3 min
Beginner
Video
Theory
A crash course overview on second order dynamics in the frequency domain, what the key parameters are, and why they matter.
See More![Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_306.jpg?itok=SzmzyZ6Z)
Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]
10 min
Beginner
Video
Theory
Here we use the Cayley-Hamilton Theorem to show that the full state space is reachable if and only if the system is controllable.
See More
Control Bootcamp: Observability
8 min
Beginner
Video
Theory
This video explores the observability of a linear system, namely the ability to estimate the full state "x(t)" from a time-history of limited output measurements "y(t)".
See More
Understanding PID Control, Part 3: Expanding Beyond a Simple Derivative
11 min
Beginner
Video
Theory
This video describes how to make an ideal PID controller more robust when controlling real systems that don’t behave like ideal linear models. Noise is generated by sensors and is present in...
See More
Using a Homogeneous Transformation Matrix to Combine Rotation and Translatio...
63 min
Beginner
Video
Theory
In this video we discuss how to properly deal with coordinate frames that are both rotated and translated from one another. We develop a homogeneous transfo...
See More
MIT 6.S191: Introduction to Deep Learning
Beginner
Video
Theory
MIT's introductory course on deep learning methods with applications to computer vision, natural language processing, biology, and more! Students will gain foundational knowledge of deep...
See More