

Drone Simulation and Control, Part 3: How to Build the Flight Code
18 min
Beginner
Video
Theory
This video describes how to create quadcopter flight software from the control architecture developed in the last video. It covers how to process the raw sensor readings and use them with...
See More
Time domain - tutorial 9: convolution examples
25 min
Beginner
Video
Theory
In this video, we use a systematic approach to solve lots of examples on convolution. By the end of this lecture, you should be able to find convolution betw...
See More
Control Bootcamp: Benefits of Feedback on Cruise Control Example (Part 2)
11 min
Beginner
Video
Theory
Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise control example. (Part 2)
See More")
Frequency domain – tutorial 3: filtering (periodic signals)
13 min
Beginner
Video
Theory
In this video, we learn about filtering which enables us to manipulate the frequency content of a signal. A common filtering application is to preserve desi...
See More
Stanford CS229: Machine Learning | Autumn 2018
Beginner
Video
Theory
Autumn 2018 Stanford course on machine learning by Andrew Ng.
See More
The Fourier Transform and Derivatives
10 min
Beginner
Video
Theory
This video describes how the Fourier Transform can be used to accurately and efficiently compute derivatives, with implications for the numerical solution of differential equations.
See More
Constraint Enforcement for Improved Safety | Learning-Based Control
14 min
Beginner
Video
Theory
Learn about the constraints of your system. Then see a how to enforce those constraints so the system does not violate them. Constraint enforcement is important for safety-critical...
See More
Peter Ponders PID, Natural Frequency vs Frequency of Acceleration
9 min
Beginner
Video
Theory
This video is intended for servo hydraulic system designers and those that program hydraulic servo systems but it does show how several of the techniques sho...
See More
Transfer Functions in Simulink for Process Control
11 min
Beginner
Video
Theory
An introduction on deriving transfer functions from a linearized state space model via Laplace Transforms, and how we can input transfer functions into Simul...
See More
Lecture 28: Lag Compensator Design using Bode Plots
51 min
Beginner
Video
Theory

Peter Ponders PID - Observers/Estimators
26 min
Beginner
Video
Theory

Direct Design Example for PID Controller
7 min
Beginner
Video
Theory
I go through an example problem of how we can use Direct Design (also called Direct Synthesis) to determine the tuning parameters for a PID controller, given...
See More
Lecture 10: Second Order Underdamped Systems: Unit step response and time do...
23 min
Beginner
Video
Theory
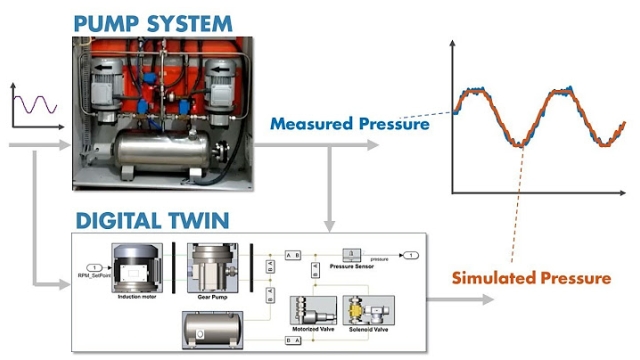
Digital Twin Parameter Tuning
9 min
Beginner
Video
Theory
Learn how to tune the digital twin model of a pump system to its physical asset using Simulink Design Optimization™. You can use measured data collected from the physical system to tune the...
See More
What Is a Control System and Why Should I Care? (Part 2)
34 min
Beginner
Video
Theory
This talk gives a glimpse of some of the methods and math that allow us to understand feedback systems. Continuing on from Part 1, it gives a description of how we use scientific principles...
See More
State Space to Transfer Function
48 min
Beginner
Video
Theory
In this video we show how to transform a linear state space representation of a dynamic system to an equivalent transfer function representation. We will de...
See More
Designing a Lag Compensator with Root Locus
11 min
Beginner
Video
Theory
This video walks through a phase lag compensator example using the Root Locus method.
See More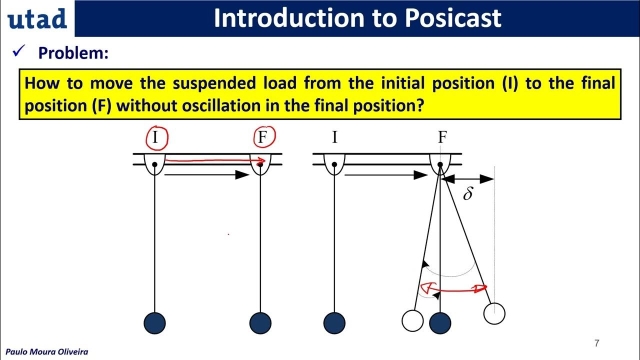
Posicast Control - 1 ( In English)
11 min
Beginner
Video
Theory
This video is an introduction to a learning journey about Posicast Control structured as follows: - Preface - Motivation - Introduction to Posicast Control - Half-Cycle Posicast
See More
Computing Euler Angles: The Euler Kinematical Equations and Poisson’s Kinema...
79 min
Beginner
Video
Theory
In this video we discuss how the time rate of change of the Euler angles are related to the angular velocity vector of the vehicle. This allows us to design...
See More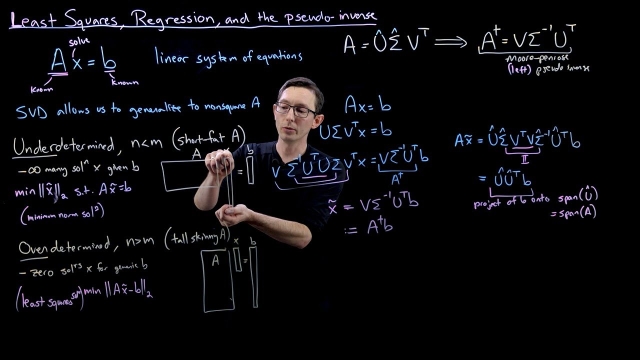
Least Squares Regression and the SVD
5 min
Beginner
Video
Theory
This video describes how the SVD can be used to solve linear systems of equations. In particular, it is possible to solve nonsquare systems (overdetermined or underdetermined) via least...
See More
Bode Plots of Complex Transfer Functions
65 min
Beginner
Video
Theory
In this video we discuss how to generate a bode plot of a complex transfer function by decomposing it into the individual components. We then show how one c...
See More
Machine Learning Control: Tuning a PID Controller with Genetic Algorithms
16 min
Beginner
Video
Theory
This lecture shows how to use genetic algorithms to tune the parameters of a PID controller. Tuning a PID controller with genetic algorithms is not generally recommended, but is used to...
See More
Understanding Sensor Fusion and Tracking, Part 2: Fusing a Mag, Accel, and G...
16 min
Beginner
Video
Theory
This video describes how we can use a magnetometer, accelerometer, and a gyro to estimate an object’s orientation. The goal is to show how these sensors contribute to the solution, and to...
See More
CORRECTION: Bode Plots by Hand: Complex Poles or Zeros
10 min
Beginner
Video
Theory
I explain how to determine the straight-line estimate of the Bode Plot for a second order transfer function with a pair of complex poles. This video is a repeat of the last half of the Bode...
See More
Solving the 2D Wave Equation
73 min
Beginner
Video
Theory
In this video, we solve the 2D wave equation. We utilize two successive separation of variables to solve this partial differential equation. Topics discuss...
See More