

")
Control Bootcamp: Sensitivity and Complementary Sensitivity (Part 2)
8 min
Beginner
Video
Theory
Here we explore the sensitivity and complementary sensitivity functions, which are critical in understanding robustness and performance. (Part 2)
See More
Control Systems in Practice, Part 6: What Are Non-Minimum Phase Systems?
14 min
Beginner
Video
Theory
We like to categorize transfer functions into groups and label them because it helps us understand how a particular system will behave simply by knowing the group that it’s part of. We gain...
See More
Practical Implementation Issues with a Full State Feedback Controller
63 min
Beginner
Video
Theory
In this video we investigate practical implementation issues that may arise when attempting to use a full state feedback controller on a real system. We ill...
See More
Time domain - tutorial 7: system properties
22 min
Beginner
Video
Theory
In this video, we cover system properties. The concept of memoryless, causal, stable, invertible, time-invariant and linear systems is intuitively explained...
See More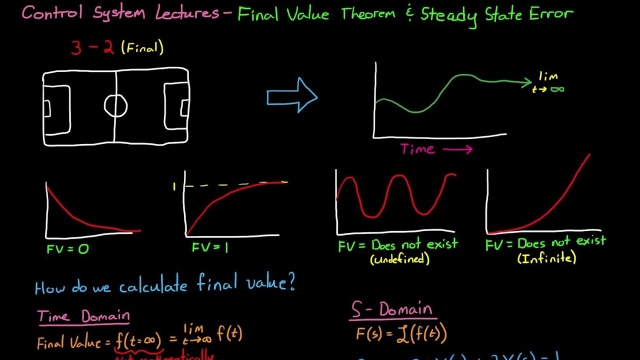
Final Value Theorem and Steady State Error
12 min
Beginner
Video
Theory
This Final Value Theorem is a way we can determine what value the time domain function approaches at infinity but from the S-domain transfer function. This is very helpful when we're trying...
See More
Time domain - tutorial 10: interconnection of LTI systems
7 min
Beginner
Video
Theory
In this video, we learn how to connect LTI systems to make a bigger system. The learning objectives are to:1) get familiar with parallel and series intercon...
See More
Euler (Gimbal Lock) Explained
8 min
Beginner
Video
Theory
In this video we explore Euler Rotations, the most common method for orienting objects in 3d. It's by-product "gimbal lock" can cause headaches for animators because the animated motion can...
See More
Overview of Dempster-Shafer Theory (Evidence Theory)
Beginner
Article / Blog
Theory
This is an overview of Dempster-Shafer Theory (Evidence Theory) that provides an introduction, definition, basic information about combination rules, some issues with the theory, and the...
See More
Peter Ponders PID - LQR Optimizing Two Outputs
16 min
Beginner
Video
Theory

Lecture 16: More on Root Locus and Gain Compensation
43 min
Beginner
Video
Theory

Finding Transfer Functions from Response Graphs
9 min
Beginner
Video
Theory
Given a system response to a unit step change, in this video I'll cover how we can derive the transfer function so we can predict how our system will respond...
See More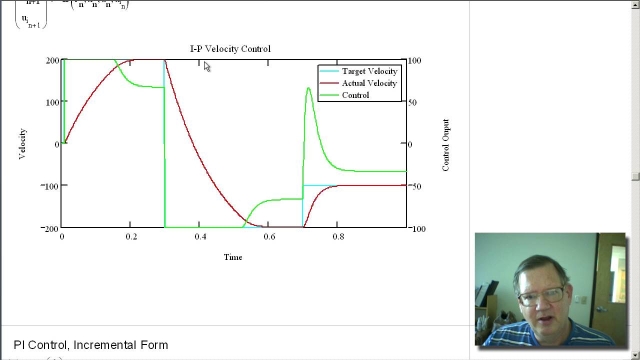
Peter Ponders PID - Controlling a non-integrating single pole system. Part 3...
9 min
Beginner
Video
Theory
Part 3 uses PI control which is the only practical means of control a non-integrating single pole system.http://deltamotion.comhttp://forum.deltamotion.com
See More with Smith Predictor")
SOPDT Sliding Mode Control ( SMC ) with Smith Predictor
6 min
Beginner
Video
Theory

Lecture 8: More on Transfer Functions
23 min
Beginner
Video
Theory

Bode Plot Gain and Phase Margin Determination
5 min
Beginner
Video
Theory
I'll show you how we can determine the Gain and Phase Margin from a Bode Plot (at some fixed controller gain).
See More
The Taylor Series
84 min
Beginner
Video
Theory
In this video we discuss the Taylor Series (and the closely related Maclaurin Series). These are two specific types of Power Series that allow you to approx...
See More
Control Bootcamp: Loop shaping
7 min
Beginner
Video
Theory
This video explores shaping the loop transfer function to have desirable sensitivity and complementary sensitivity.
See More
Euler Angles and the Euler Rotation Sequence
70 min
Beginner
Video
Theory
In this video we discuss how Euler angles are used to define the relative orientation of one coordinate frame to another.Topics and Timestamps:0:00 – Introd...
See More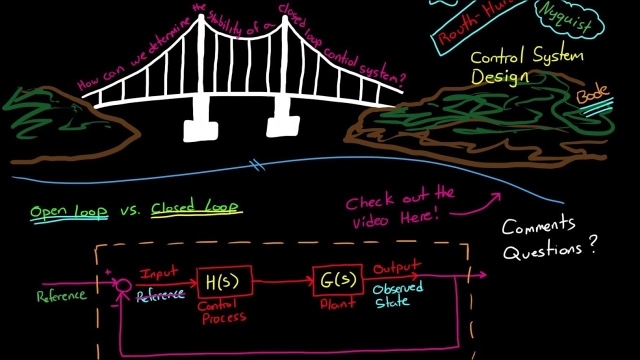
Stability of Closed Loop Control Systems
11 min
Beginner
Video
Theory
This video explains why we need design tools like the Routh-Hurwitz Criterion, Bode Plots, Nyquist Plots, and Root Locus. This is an introduction into the difficulties of determining the...
See More
Understanding and Sketching Individual Bode Plot Components
148 min
Beginner
Video
Theory
In this video we illustrate how 7 types of simple transfer functions contribute to a bode plot. We refer to these as ‘components’ and will cover the followi...
See More![Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_306.jpg?itok=SzmzyZ6Z)
Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]
10 min
Beginner
Video
Theory
Here we use the Cayley-Hamilton Theorem to show that the full state space is reachable if and only if the system is controllable.
See More
Understanding Sensor Fusion and Tracking, Part 3: Fusing a GPS and IMU to Es...
14 min
Beginner
Video
Theory
This video continues our discussion on using sensor fusion for positioning and localization by showing how we can use a GPS and an IMU to estimate and object’s orientation and position. We...
See More
Control Bootcamp: Observability
8 min
Beginner
Video
Theory
This video explores the observability of a linear system, namely the ability to estimate the full state "x(t)" from a time-history of limited output measurements "y(t)".
See More
Derivation of the 2D Wave Equation
27 min
Beginner
Video
Theory
In this video we derive the 2D wave equation. This partial differential equation governs the motion of waves in a plane and is applicable for thin vibrating...
See More
Frequency domain – tutorial 6: Fourier transform tables
34 min
Beginner
Video
Theory
In this video, we learn about Fourier transform tables which enable us to quickly travel from time to the frequency domain. The main learning objective is to...
See More