


Introduction to Ordinary Differential Equations
35 min
Beginner
Video
Theory
In this video we introduce the concept of ordinary differential equations (ODEs). We give examples of how these appear in science and engineering as well as...
See More
Peter Ponders PID - LQR Optimizing Two Outputs
16 min
Beginner
Video
Theory

Lecture 16: More on Root Locus and Gain Compensation
43 min
Beginner
Video
Theory

Cartesian, Polar, Cylindrical, and Spherical Coordinates
54 min
Beginner
Video
Theory
In this video we discuss Cartesian, Polar, Cylindrical, and Spherical coordinates as well as develop forward and reverse transformations to go from one coord...
See More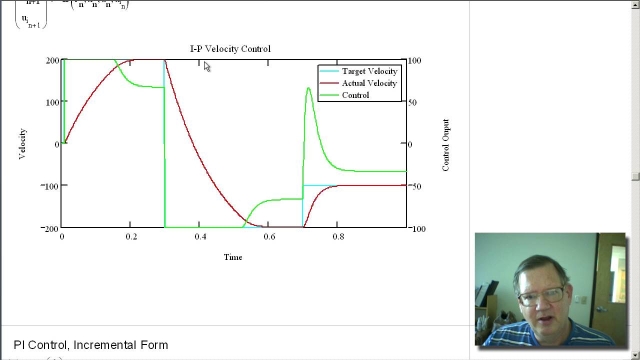
Peter Ponders PID - Controlling a non-integrating single pole system. Part 3...
9 min
Beginner
Video
Theory
Part 3 uses PI control which is the only practical means of control a non-integrating single pole system.http://deltamotion.comhttp://forum.deltamotion.com
See More
Lecture 23: Bode plots
48 min
Beginner
Video
Theory

Root Locus Plot: Common Questions and Answers
17 min
Beginner
Video
Theory
In this video I go through some of the common questions I've received on my other root locus videos. 1) Why do we call the poles of a system the roots?2) How do I plot the damping ratio...
See More
Time Domain Analysis with Matlab: Using the Linear System Analyzer
37 min
Beginner
Video
Theory
In this video we explore various Matlab functions and workflows to perform time domain analysis of a dynamic system. This includes the use of ‘tf’, ‘step’, ...
See More
Introduction to Partial Differential Equations
52 min
Beginner
Video
Theory
This is the first lesson in a multi-video discussion focused on partial differential equations (PDEs).In this video we introduce PDEs and compare them with o...
See More
Control Bootcamp: Loop shaping
7 min
Beginner
Video
Theory
This video explores shaping the loop transfer function to have desirable sensitivity and complementary sensitivity.
See More
Time domain - tutorial 4: transformation examples
5 min
Beginner
Video
Theory
In this video, we solve examples to practice different signal transformations using a systematic approach. By the end of this lecture, you should be able to ...
See More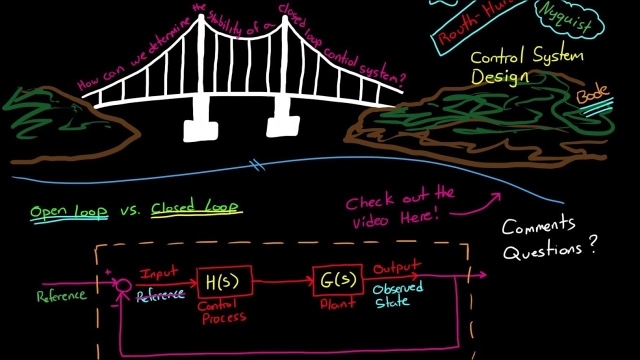
Stability of Closed Loop Control Systems
11 min
Beginner
Video
Theory
This video explains why we need design tools like the Routh-Hurwitz Criterion, Bode Plots, Nyquist Plots, and Root Locus. This is an introduction into the difficulties of determining the...
See More
Laplace domain – tutorial 6: Transfer function & system properties
24 min
Beginner
Video
Theory
In this video, we learn about transfer function and system properties. The following materials are covered:1) what is a transfer function?2) relation between...
See More![Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_306.jpg?itok=SzmzyZ6Z)
Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]
10 min
Beginner
Video
Theory
Here we use the Cayley-Hamilton Theorem to show that the full state space is reachable if and only if the system is controllable.
See More
Control Bootcamp: Observability
8 min
Beginner
Video
Theory
This video explores the observability of a linear system, namely the ability to estimate the full state "x(t)" from a time-history of limited output measurements "y(t)".
See More
IMC PID Design of a Second Order Process
8 min
Beginner
Video
Theory
IMC PID Design of a Second Order Process
See More
Second Order Dynamics
3 min
Beginner
Video
Theory
A crash course overview on second order dynamics in the frequency domain, what the key parameters are, and why they matter.
See More
Fourier Series: Part 2
6 min
Beginner
Video
Theory
This video will show how to approximate a function with a Fourier series, which is an infinite sum of sines and cosines. We will discuss how these sines and cosines form a basis for the...
See More
Lecture 5: Block Diagram Reduction
46 min
Beginner
Video
Theory

PID Control - A brief introduction
7 min
Beginner
Video
Theory
In this video, I introduce the topic of PID control. This is a short introduction design to prepare you for the next few lectures where I will go through several examples of PID control....
See More
Trimming a Model of a Dynamic System Using Numerical Optimization
60 min
Beginner
Video
Theory
In this video we show how to find a trim point of a dynamic system using numerical optimization techniques. We generate a cost function that corresponds to ...
See More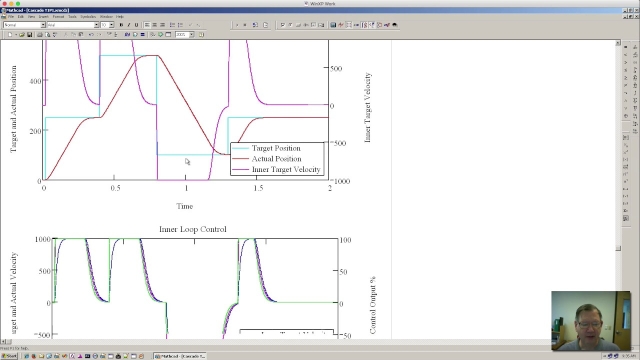
Peter Ponders PID - Cascade Control Part2
14 min
Beginner
Video
Theory
The inner loop pole locations and gains are calculated first so the inner loop pole locations are determined by the user. The outer loop poles are still pla...
See More
Lecture 3: Electrical and Mechanical System Transfer Functions
52 min
Beginner
Video
Theory

Controllability of a Linear System: The Controllability Matrix and the PBH T...
97 min
Beginner
Video
Theory
In this video we explore controllability of a linear system. We discuss two methods to test for controllability, the controllability matrix as well as the P...
See More with Smith Predictor")
SOPDT Sliding Mode Control ( SMC ) with Smith Predictor
6 min
Beginner
Video
Theory