


Laplace domain – tutorial 3: Laplace transform tables
17 min
Beginner
Video
Theory
In this video, we cover Laplace transform tables which help us to quickly find Laplace and inverse Laplace transforms. The main learning objective is to full...
See More![Motivation for Full-State Estimation [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_378.jpg?itok=AFDlS2AH "Motivation for Full-State Estimation [Control Bootcamp]")
Motivation for Full-State Estimation [Control Bootcamp]
11 min
Beginner
Video
Theory
This video discusses the need for full-state estimation. In particular, if we want to use full-state feedback (e.g., LQR), but only have limited measurements of the system, it is necessary...
See More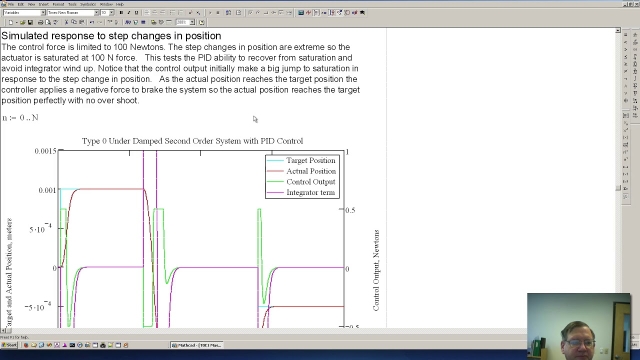
Peter Ponders PID - Controlling an Under Damp Mass and Spring System
24 min
Beginner
Video
Theory
Demonstrates:How to calculate the PID gains. The importance of the derivative gain. How to simulate the mass and spring systemControl limitations based on s...
See More
Lecture 18: PI and Lag Compensator Design using Root Locus
41 min
Beginner
Video
Theory

Cascade Control Intro
8 min
Beginner
Video
Theory
How can we improve the disturbance rejection of our controllers using additional, relevant measurements? Tune in to find out!
See More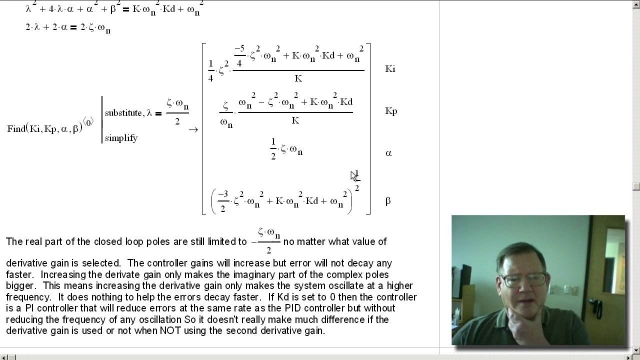
Peter Ponders PID - Why PID with 2nd Derivative Gain?
27 min
Beginner
Video
Theory
If you have ever tuned a hydraulic system and wondered why PID control didn't work better than PI control the answer is here. Since the 1980s people have kn...
See More
Lecture 20: PID and Lag-Lead Compensator Design using Root Locus
74 min
Beginner
Video
Theory

Dynamic Modeling in Process Control
14 min
Beginner
Video
Theory
I'll show you how we can build the dynamic models necessary to derive process transfer functions as an introduction to process control.
See More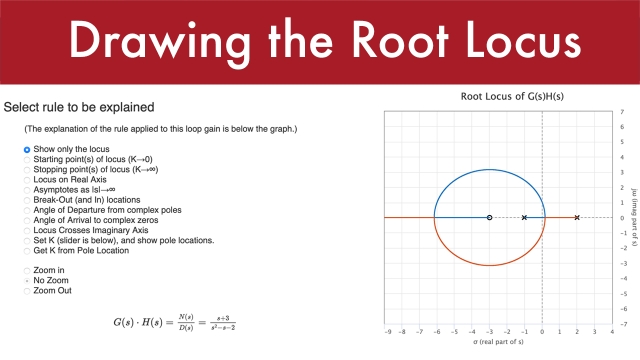
Drawing the root locus (Interactive Tool)
Beginner
App
Theory
This page was developed to help student learn how to sketch the root locus by hand. You can enter a numerator and denominator for G(s)H(s) (i.e., the loop gain) and the program will guide...
See More
Designing a Lead Compensator with Root Locus
13 min
Beginner
Video
Theory
This video walks through a phase lead compensator example using the Root Locus method.
See More
Equations of Motion for a Planar Vehicle
43 min
Beginner
Video
Theory
In this video we outline equations of motion for a simple planar vehicle. This model is suitable for vehicles such as boats or hovercraft that that are rest...
See More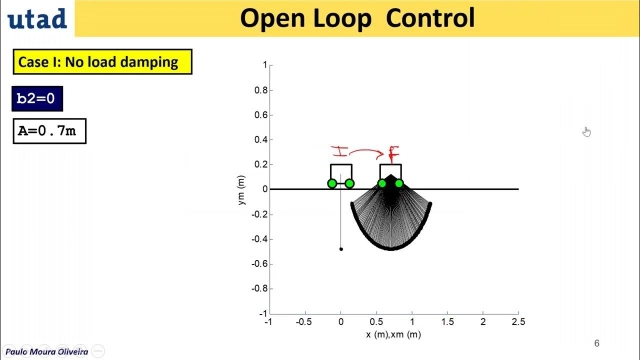
Posicast Control -3 - ( In English )
8 min
Beginner
Video
Theory
In this video a Gantry-Crane control simulation problem is introduced. The problem is presented and some introductory simulations are shown.
See More
Control Bootcamp: Three Equivalent Representations of Linear Systems
12 min
Beginner
Video
Theory
This video explores three equivalent representations of linear systems: State-space ODEs, Frequency domain transfer functions, and Time-domain impulse response convolution.
See More
Understanding PID Control, Part 3: Expanding Beyond a Simple Derivative
11 min
Beginner
Video
Theory
This video describes how to make an ideal PID controller more robust when controlling real systems that don’t behave like ideal linear models. Noise is generated by sensors and is present in...
See More
Using a Homogeneous Transformation Matrix to Combine Rotation and Translatio...
63 min
Beginner
Video
Theory
In this video we discuss how to properly deal with coordinate frames that are both rotated and translated from one another. We develop a homogeneous transfo...
See More
Lectures on Adaptive Control and Learning by Tansel Yucelen
Beginner
Video
Theory
A serie of lectures on the topic of adaptive controllers.
See More
Machine Learning Goals
7 min
Beginner
Video
Theory
This lecture discusses the high-level goals of machine learning, and what we want out of our models. Goals include speed and accuracy, along with interpretability, generalizability...
See More
The Routh-Hurwitz Stability Criterion
82 min
Beginner
Video
Theory
In this video we explore the Routh Hurwitz Stability Criterion and investigate how it can be applied to control systems engineering. The Routh Hurwitz Stabi...
See More
Neural Networks and Deep Learning
7 min
Beginner
Video
Theory
This lecture explores the recent explosion of interest in neural networks and deep learning in the context of 1) vast and increasing data sets, and 2) rapidly improving computational...
See More
Understanding Sensor Fusion and Tracking, Part 5: How to Track Multiple Obje...
15 min
Beginner
Video
Theory
This video describes two common problems that arise when tracking multiple objects: data association and track maintenance. We cover a few ways to solve these issues and provide a general...
See More
Solving the 1D Heat Equation
47 min
Beginner
Video
Theory
In this video we simplify the general heat equation to look at only a single spatial variable, thereby obtaining the 1D heat equation. We solving the result...
See More
Discrete control #5: The bilinear transform
15 min
Beginner
Video
Theory
This is video number five on discrete control and here, we’re going to cover the famous and useful bilinear transform. The bilinear transform is yet another method for converting, or mapping...
See More
Time domain - tutorial 11: system properties from impulse response
13 min
Beginner
Video
Theory
In this video, we learn how to find system properties from the impulse response. Specifically, memoryless, causal, stable and invertible systems will be ful...
See More
Fourier Series: Part 1
12 min
Beginner
Video
Theory
This video will show how to approximate a function with a Fourier series, which is an infinite sum of sines and cosines. We will discuss how these sines and cosines form a basis for the...
See More
Time domain - tutorial 2: signal representation
2 min
Beginner
Video
Theory
In this video, we review how to represent information as a signal. The information can be anything such as voice (1D) or an image (2D) or even a video (3D). ...
See More