

Linear Algebra Review
Intermediate
Course
Theory
This short course is a quick review of linear algebra, intended for students who have already taken a previous course in linear algebra or have some experience with vectors and matrices. The...
See More
FMCW Radar for Autonomous Vehicles | Understanding Radar Principles
18 min
Beginner
Video
Theory
Watch an introduction to Frequency Modulated Continuous Wave (FMCW) radar and why it’s a good solution for autonomous vehicle applications. This demonstration will show how FMCW radar can...
See More
Understanding PID Control, Part 6: Manual and Automatic Tuning Methods
13 min
Beginner
Video
Theory
The previous video showed three different approaches to developing a mathematical model of your physical system. Now that we have this model, we can use it to tune a PID controller that will...
See More
Control Systems in Practice, Part 9: The Step Response
15 min
Beginner
Video
Theory
This video covers a few interesting things about the step response. We’ll look at what a step response is and some of the ways it can be used to specify design requirements for closed loop...
See More
An Introduction to Multi-Agent Reinforcement Learning
Beginner
Video
Theory
Learn what multi-agent reinforcement learning is and some of the challenges it faces and overcomes. You will also learn what an agent is and how multi-agent systems can be both cooperative...
See More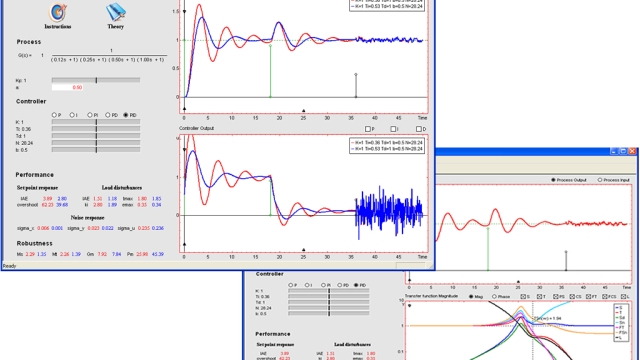
Interactive Tool for PID understanding
Intermediate
App
Application
The module PID Basics is designed to explore the properties of a simple feedback loop by showing the time and frequency responses of a closed-loop system and demonstrating how these...
See More
Reinforcement Learning for Engineers, Part 3: Policies and Learning Algorith...
17 min
Beginner
Video
Theory
This video provides an introduction to the algorithms that reside within the agent. We’ll cover why we use neural networks to represent functions and why you may have to set up two neural...
See More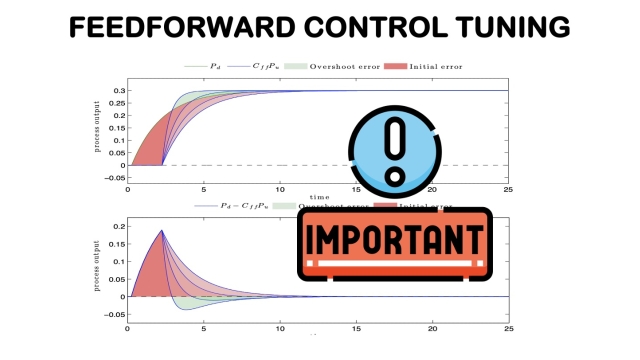
Advances in feedforward control for measurable disturbances
35 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More
System Identification Methods
17 min
Beginner
Video
Theory
System Identification is the process of determining the model or the equations of motion for your system. This is incredibly important because basing a control system design off of a bad...
See More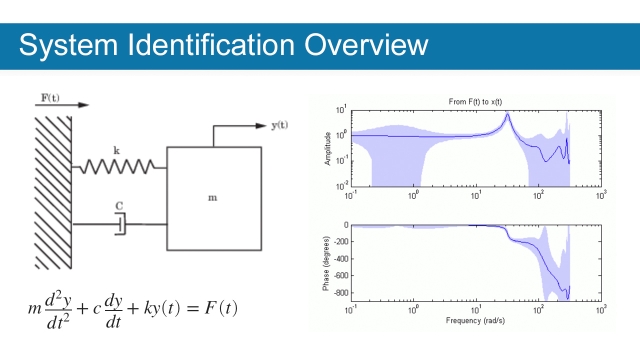
System Identification Overview
Beginner
Article / Blog
Theory
System identification is a methodology for building mathematical models of dynamic systems using measurements of the input and output signals of the system. This overview from Mathworks...
See More
Introducing Feedback Control to Middle and High School STEM Students, Part 1...
60 min
Intermediate
Article / Blog
Demonstration
This paper was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at...
See More
The AVA Flight Computer
18 min
Beginner
Video
Application
This video describes the board design, hardware architecture, and software components of the All Vehicle Avionics (AVA) flight computer that was designed by Joe Barnard of BPS Space. This...
See More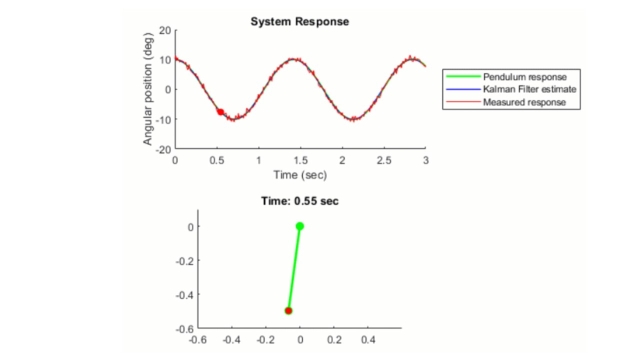
Kalman Filter Virtual Lab
Intermediate
Virtual Lab
Application
The Kalman Filter virtual laboratory contains interactive exercises that let you study linear and extended Kalman filter design for state estimation of a simple pendulum system. The virtual...
See More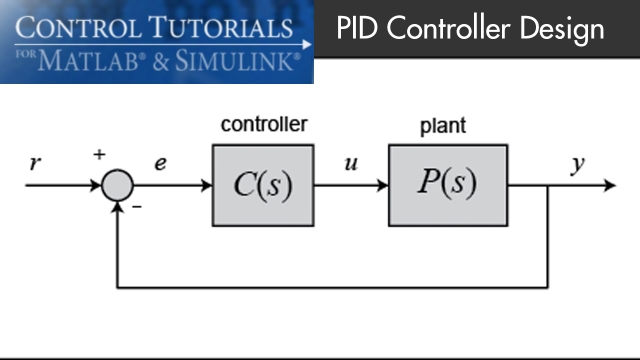
Introduction: PID Controller Design
30 min
Beginner
Article / Blog
Application
In this tutorial we will introduce a simple, yet versatile, feedback compensator structure: the Proportional-Integral-Derivative (PID) controller. The PID controller is widely employed...
See More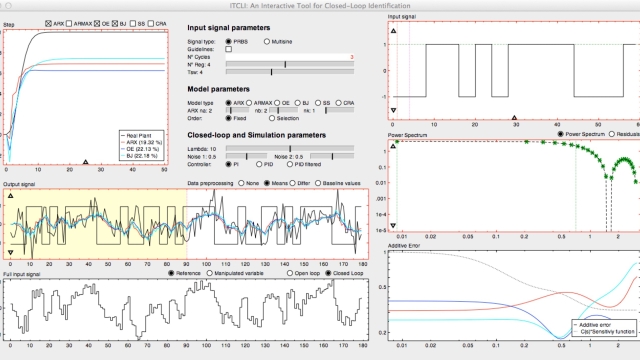
ITCLI: An Interactive Tool for Closed-Loop Identification
Intermediate
App
Application
The Interactive Tool for Closed-Loop Identification (ITCLI) is an interactive software tool for understanding SISO closed-loop identification using prediction-error techniques. The tool...
See More
Reinforcement Learning for Engineers, Part 2: Understanding the Environment ...
13 min
Beginner
Video
Theory
In this video, we build on our basic understanding of reinforcement learning by exploring the workflow. We cover what an environment is and some of the benefits of training within a...
See More
Adaptive Control Basics: What Is Model Reference Adaptive Control?
17 min
Beginner
Video
Theory
Use an adaptive control method called model reference adaptive control (MRAC). This controller can adapt in real time to variations and uncertainty in the system that is being controlled...
See More
Autonomous Navigation, Part 4: Path Planning with A* and RRT
18 min
Beginner
Video
Theory
This video explores some of the ways that we can use a map like a binary occupancy grid for motion and path planning. We briefly cover what motion planning means and how we can use a graph...
See More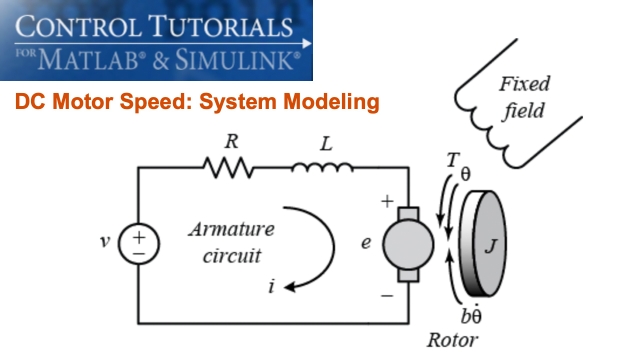
DC Motor Speed: System Modeling
Beginner
Project
Theory
This examples walks through modeling a simple DC motor in MATLAB.
See More
TinyEKF: Lightweight C/C++ Extended Kalman Filter with Python for prototypin...
Intermediate
Software
Application
TinyEKF is a simple C/C++ implementation of the Extended Kalman Filter that is general enough to use on different projects. In order to make it practical for running on Arduino, STM32, and...
See More
Understanding PID Control, Part 4: A PID Tuning Guide
12 min
Beginner
Video
Theory
It can be difficult to navigate all the resources that promise to explain the secrets of PID tuning. Some proclaim that PID tuning is an art that requires finesse and experience, while...
See More
System Identification: Koopman with Control
10 min
Intermediate
Video
Theory
This lecture provides an overview of the use of modern Koopman spectral theory for nonlinear control. In particular, we develop control in a coordinate system defined by eigenfunctions of...
See More
Data-Driven Dynamical Systems Overview
21 min
Intermediate
Video
Theory
This video provides a high-level overview of this new series on data-driven dynamical systems. In particular, we explore the various challenges in modern dynamical systems, along with...
See More
Understanding Kalman Filters, Part 5: Nonlinear State Estimators
8 min
Beginner
Video
Theory
This video explains the basic concepts behind nonlinear state estimators, including extended Kalman filters, unscented Kalman filters, and particle filters.
A Kalman filter is only defined...
See More
Improving the Beginner's PID - Introduction
30 min
Beginner
Article / Blog
Application
In conjunction with the release of the new Arduino PID Library Brett has released this series of posts that explain his PID code. He start's with what he call's “The Beginner’s PID.” He...
See More