


Lecture 9: Time response and Time domain specifications
35 min
Beginner
Video
Theory
Fuzzy Logic, Part 3: Design and Applications of a Fuzzy Logic Controller
17 min
Beginner
Video
Theory
This video walks you through the process of designing a fuzzy inference system that can balance a pole on a cart. You can design a fuzzy logic controller using just experience and intuition...
See More")
A Nonlinear, 6 DOF Dynamic Model of an Aircraft: the Research Civil Aircraft...
103 min
Beginner
Video
Theory
In this video we develop a dynamic model of an aircraft by describing forces and moments generated by aerodynamic, propulsion, and gravity that act on the ai...
See More
Routh-Hurwitz Criterion, Beyond Stability
11 min
Beginner
Video
Theory
This video explains of few uses of the Routh-Hurwitz Criterion that go beyond simply determining how many poles exist in the right half plane. I cover how to determine gain margin and how...
See More
Lecture 26: Stability examples, GM and PM using Nyquist Stability Criterion
56 min
Beginner
Video
Theory

Controllability of a Linear System: The Controllability Matrix and the PBH T...
97 min
Beginner
Video
Theory
In this video we explore controllability of a linear system. We discuss two methods to test for controllability, the controllability matrix as well as the P...
See More
Posicast Control 2 - ( In English )
5 min
Beginner
Video
Theory
This video is about the Half-Cycle Posicast. It includes some hints about how to simulate this type of control using Simulink
See More
PID Control with Posicast 7 - ( In English )
12 min
Beginner
Video
Theory
In this video closed-loop configurations with PID controllers and Posicast are introduced.
See More
Control Systems Lectures - Transfer Functions
11 min
Beginner
Video
Theory
This lecture describes transfer functions and how they are used to simplify modeling of dynamic systems.
See More
Lecture 25: Nyquist stability criterion
48 min
Beginner
Video
Theory
")
Velocity & Acceleration in Non-Inertial Reference Frames (Coriolis &...
133 min
Beginner
Video
Theory
In this video we derive a mathematical description of velocity and acceleration in non-inertial reference frame. We examine the effect of fictitious forces ...
See More![Randomized SVD Code [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_402.jpg?itok=pmR7mX3g)
Randomized SVD Code [Python]
10 min
Beginner
Video
Application
This video describes the randomized singular value decomposition (rSVD) (Python code).
See More
Bode Plots by Hand: Real Constants
8 min
Beginner
Video
Theory
This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a simple transfer function; a real constant.
See More
Laplace domain – tutorial 1: Laplace transform
15 min
Beginner
Video
Theory
In this video, we learn about Laplace transform which enables us to travel from time to the Laplace domain. The following materials are covered:1) why we nee...
See More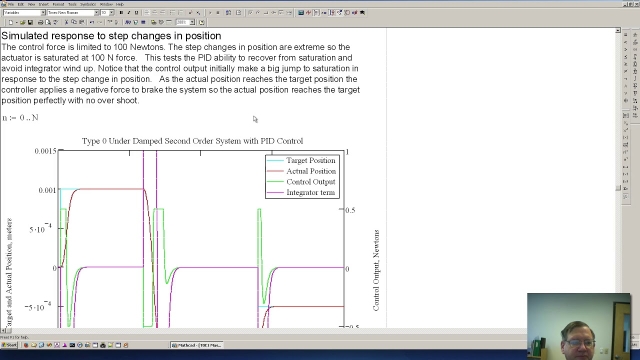
Peter Ponders PID - Controlling an Under Damp Mass and Spring System
24 min
Beginner
Video
Theory
Demonstrates:How to calculate the PID gains. The importance of the derivative gain. How to simulate the mass and spring systemControl limitations based on s...
See More
Control Systems Lectures - Time and Frequency Domain
10 min
Beginner
Video
Theory
This lecture introduces the time and frequency domains. A very quick description of the Laplace Transform is given which will be the base of many of classical control lectures in the future...
See More
Frequency domain – tutorial 9: frequency response
23 min
Beginner
Video
Theory
In this video, the learning objectives are to:1- fully understand the frequency response which forms the foundation of filtering 2- quickly review the common...
See More
Internal Model Control Example Problem
6 min
Beginner
Video
Theory
I walk through how to design a feedback controller based on a given process transfer function, using Internal Model Control.
See More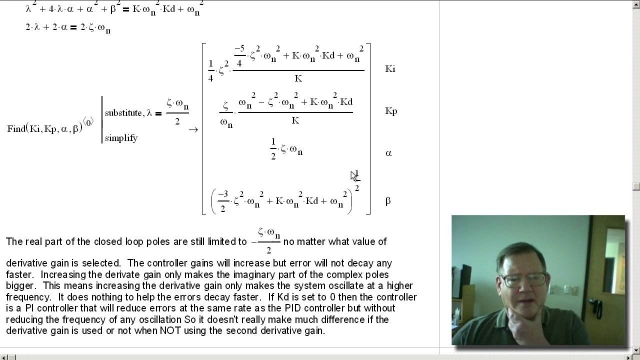
Peter Ponders PID - Why PID with 2nd Derivative Gain?
27 min
Beginner
Video
Theory
If you have ever tuned a hydraulic system and wondered why PID control didn't work better than PI control the answer is here. Since the 1980s people have kn...
See More
Drone Simulation and Control, Part 4: How to Build a Model for Simulation
11 min
Beginner
Video
Theory
This video describes how a good model of the drone and the environment it operates in can be used for simulation and test. It shows how nonlinear and linear models are both needed for...
See More
Direct Synthesis Method Numerator Dynamics Problem
10 min
Beginner
Video
Theory
I walk through how to design a PID feedback controller when given a second order process with numerator dynamics, using the Direct Synthesis Method.
See More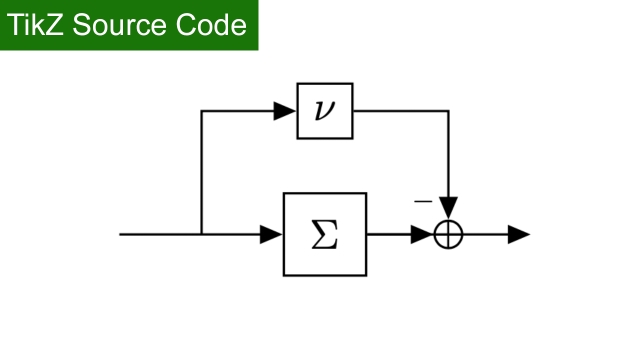
TikZ source Code: Feedforward passivity index
Beginner
Source Code
Application
TikZ source Code: Feedforward passivity index
See More
Control Systems in Practice, Part 6: What Are Non-Minimum Phase Systems?
14 min
Beginner
Video
Theory
We like to categorize transfer functions into groups and label them because it helps us understand how a particular system will behave simply by knowing the group that it’s part of. We gain...
See More![Fourier Series [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_361.jpg?itok=HDuxGf-8 "Fourier Series [Matlab]")
Fourier Series [Matlab]
8 min
Beginner
Video
Application
This video will describe how to compute the Fourier Series in Matlab.
See More
Predicting Second Order Transfer Function Behavior
4 min
Beginner
Video
Theory
Given a second order transfer function, I'll cover how we can predict the system behavior and derive the appropriate time constants and damping coefficient.
See More