


Bode Plot Gain and Phase Margin Determination
5 min
Beginner
Video
Theory
I'll show you how we can determine the Gain and Phase Margin from a Bode Plot (at some fixed controller gain).
See More
Understanding PID Control, Part 2: Expanding Beyond a Simple Integral
10 min
Beginner
Video
Theory
The first video in this series described a PID controller, and it showed how each of the three branches help control your system.That seemed simple enough and appeared to work. However, in...
See More
The Taylor Series
84 min
Beginner
Video
Theory
In this video we discuss the Taylor Series (and the closely related Maclaurin Series). These are two specific types of Power Series that allow you to approx...
See More
MIT 6.S191: Introduction to Deep Learning
Beginner
Video
Theory
MIT's introductory course on deep learning methods with applications to computer vision, natural language processing, biology, and more! Students will gain foundational knowledge of deep...
See More
A Visual Introduction to Machine Learning
Beginner
Article / Blog
Theory
Machine Learning Explained in interactive visualizations (part 1).
See More
Peter Ponders PID - Integrated Time Absolute Error - 4 Pole example
17 min
Beginner
Video
Theory
This video shows how to calculate the coefficients for a 4 pole ITAE and how to use the 4 pole ITAE to calculate closed loop controller gains.
See More![Controllability and the PBH Test [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_303.jpg?itok=Q45x3uZ4)
Controllability and the PBH Test [Control Bootcamp]
13 min
Beginner
Video
Theory
This video describes the PBH test for controllability and describes some of the implications for good choices of "B".
See More
Understanding Sensor Fusion and Tracking, Part 3: Fusing a GPS and IMU to Es...
14 min
Beginner
Video
Theory
This video continues our discussion on using sensor fusion for positioning and localization by showing how we can use a GPS and an IMU to estimate and object’s orientation and position. We...
See More
Understanding and Sketching the Root Locus
176 min
Beginner
Video
Theory
In this video we discuss how to sketch the root locus for a system by developing a series of 5 core rules augmented by 5 supplemental rules (for a total of 1...
See More
Peter Ponders PID - T0P1 Part 4, Misc Topics
20 min
Beginner
Video
Theory
This video covers another way to compute symbolic gains, the difference between having the P gain act on the error or just the feedback, extending bandwidt...
See More
Drone Simulation and Control, Part 3: How to Build the Flight Code
18 min
Beginner
Video
Theory
This video describes how to create quadcopter flight software from the control architecture developed in the last video. It covers how to process the raw sensor readings and use them with...
See More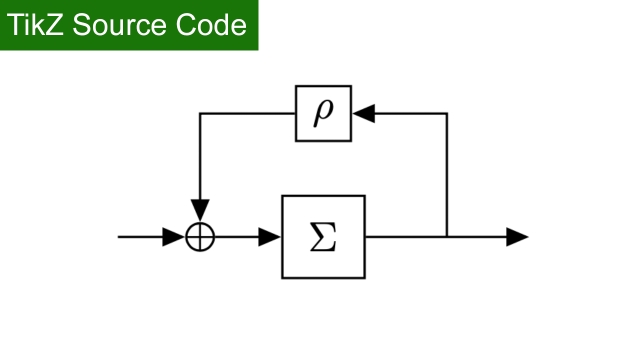
TikZ source Code: Feedback passivity index
Beginner
Source Code
Application
TikZ source Code: Feedback passivity index
See More
Fourier Analysis: Overview
7 min
Beginner
Video
Theory
This video presents an overview of the Fourier Transform, which is one of the most important transformations in all of mathematical physics and engineering. This series will introduce the...
See More
Control Bootcamp: Laplace Transforms and the Transfer Function
19 min
Beginner
Video
Theory
Here we show how to compute the transfer function using the Laplace transform.
See More
Transfer Functions: Introduction and Implementation
53 min
Beginner
Video
Theory
In this video we introduce transfer functions and show how they can be derived from a set of linear, ordinary differential equations. We also examine how to...
See More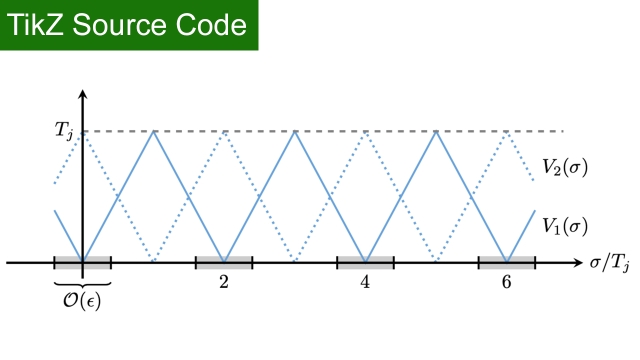
TikZ source Code: Lyapunov Lure
Beginner
Source Code
Application
TikZ source Code: Lyapunov Lure
See More
The Fourier Transform and Derivatives
10 min
Beginner
Video
Theory
This video describes how the Fourier Transform can be used to accurately and efficiently compute derivatives, with implications for the numerical solution of differential equations.
See More![SVD: Image Compression [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_419.jpg?itok=wbEekwkx)
SVD: Image Compression [Matlab]
14 min
Beginner
Video
Application
This video describes how to use the singular value decomposition (SVD) for image compression in Matlab.
See More
Introduction to Partial Differential Equations
52 min
Beginner
Video
Theory
This is the first lesson in a multi-video discussion focused on partial differential equations (PDEs).In this video we introduce PDEs and compare them with o...
See More
Control Systems with MATLAB - Time Domain Analysis
35 min
Beginner
Video
Theory

Routh Stability Criterion Intro and Example
13 min
Beginner
Video
Theory
I introduce and walk through an example problem of how we can use the Routh Stability Criterion to rigorously determine the necessary and sufficient conditio...
See More
Time domain - tutorial 4: transformation examples
5 min
Beginner
Video
Theory
In this video, we solve examples to practice different signal transformations using a systematic approach. By the end of this lecture, you should be able to ...
See More
IMC Design of an Unstable Process Example
10 min
Beginner
Video
Theory
In this video, I cover how we can use IMC method to rigorously design a controller for an inherently unstable process (has a positive pole).
See More
Laplace domain – tutorial 6: Transfer function & system properties
24 min
Beginner
Video
Theory
In this video, we learn about transfer function and system properties. The following materials are covered:1) what is a transfer function?2) relation between...
See More
Tuning a Fuzzy Logic Controller with Data | Fuzzy Logic, Part 4
18 min
Beginner
Video
Theory
This video covers the basics of data-driven approaches to tuning fuzzy inference systems. See what it means to find an optimal solution, which fuzzy inference parameters are being tuned...
See More