


Frequency domain – tutorial 6: Fourier transform tables
34 min
Beginner
Video
Theory
In this video, we learn about Fourier transform tables which enable us to quickly travel from time to the frequency domain. The main learning objective is to...
See More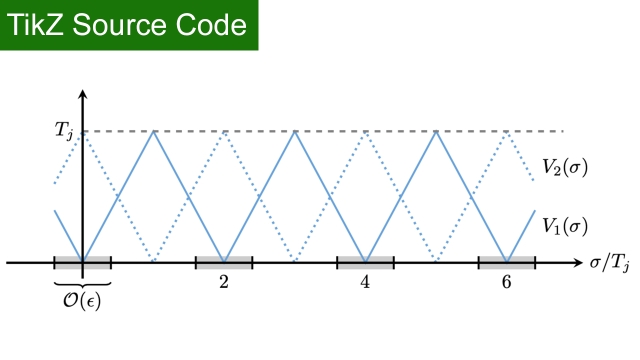
TikZ source Code: Lyapunov Lure
Beginner
Source Code
Application
TikZ source Code: Lyapunov Lure
See More
The Fourier Transform and Derivatives
10 min
Beginner
Video
Theory
This video describes how the Fourier Transform can be used to accurately and efficiently compute derivatives, with implications for the numerical solution of differential equations.
See More
Machine Learning and Cross-Validation
7 min
Beginner
Video
Theory
This lecture discusses the importance of cross-validation to assess models obtained via machine learning.
See More
Process Control Introduction
14 min
Beginner
Video
Theory
An overview on state variables, inputs (manipulated and disturbance variables), outputs (measured state variables), and an example on the balance equations w...
See More
Machine Learning Control: Tuning a PID Controller with Genetic Algorithms
16 min
Beginner
Video
Theory
This lecture shows how to use genetic algorithms to tune the parameters of a PID controller. Tuning a PID controller with genetic algorithms is not generally recommended, but is used to...
See More
Inputs and Outputs as defined by a Process Control Engineer
7 min
Beginner
Video
Theory
Defining process inputs and outputs is a lot more complicated than I initially thought when I was learning about process control. In this video, I share how ...
See More
Frequency domain – tutorial 10: modulation
22 min
Beginner
Video
Theory
In this video, we learn about modulation technique which is commonly used in communication systems to send information from transmitter to receiver. The foll...
See More
Lecture 16: More on Root Locus and Gain Compensation
43 min
Beginner
Video
Theory

Neural Network Architectures
9 min
Beginner
Video
Theory
This lecture describes the wide variety of neural network architectures available to solve various problems.
See More

Standard HW Problem #1: PID and Root Locus
18 min
Beginner
Video
Theory
A walk through of a typical homework problem using the root locus method to tune a PID controller. This is the first in what may be a series of homework style problems I'll cover. This is...
See More
Transfer Function to State Space
56 min
Beginner
Video
Theory
In this video we show how to transform a transfer function to an equivalent state space representation. We will derive various transformations such as contr...
See More")
How to Land on a Planet (and how it'll be done in the future!)
15 min
Beginner
Video
Theory
This video covers the basic ideas behind how engineers develop the algorithms that allow autonomous robots to land on other planetary bodies.
See More
Manipulating Aerodynamic Coefficients
25 min
Beginner
Video
Theory
In this video we discuss some potential problems you may encounter when attempting to perform operations with dimensionless aerodynamic coefficients such as ...
See More
Lectures on Adaptive Control and Learning by Tansel Yucelen
Beginner
Video
Theory
A serie of lectures on the topic of adaptive controllers.
See More
Routh-Hurwitz Criterion, Special Cases
13 min
Beginner
Video
Theory
This video presents two special cases that you can encounter when filling out the Routh Array. The first case is when there is a zero in a row with at least one non-zero element following...
See More
Designing a PID Controller Using the Root Locus Method
63 min
Beginner
Video
Theory
In this video we discuss how to use the root locus method to design a PID controller. In addition to discussing the theory, we look at Matlab tools to enabl...
See More
CORRECTION: Bode Plots by Hand: Complex Poles or Zeros
10 min
Beginner
Video
Theory
I explain how to determine the straight-line estimate of the Bode Plot for a second order transfer function with a pair of complex poles. This video is a repeat of the last half of the Bode...
See More
Peter Ponders PID - InputShaping
21 min
Beginner
Video
Theory

Lecture 32: Linearisation and State Space Fundamentals
96 min
Beginner
Video
Theory

Final Value Theorem
33 min
Beginner
Video
Theory
In this video we discuss the Final Value Theorem. Given a signal in the Laplace domain, this allows us to predict the steady state value of the signal in th...
See More
Peter Ponders PID - Root Locus Is Useless
25 min
Beginner
Video
Theory

Linear Systems of Equations
10 min
Beginner
Video
Theory
This video describes linear systems of equations and when they have solutions.
See More
Heat Transfer Demonstration
63 min
Beginner
Video
Theory
In this video we demonstrate heat transfer through a metal bar. By heating one side of the bar we can impose a non-uniform temperature distribution across t...
See More