


Frequency domain – tutorial 10: modulation
22 min
Beginner
Video
Theory
In this video, we learn about modulation technique which is commonly used in communication systems to send information from transmitter to receiver. The foll...
See More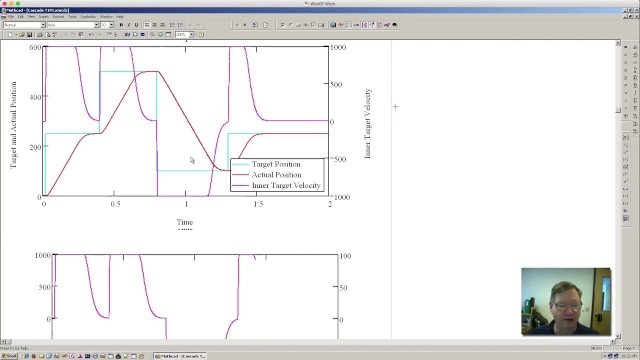
Peter Ponders PID - Cascade Control Part1
20 min
Beginner
Video
Theory
I cover whether cascade control is necessary. Why there needs to be a feed back for every loop. How to calculate gains. Bode plots and ratio of the inner t...
See More
Machine Learning Control: Genetic Algorithms
13 min
Beginner
Video
Theory
This lecture provides an overview of genetic algorithms, which can be used to tune the parameters of a control law.
See More
Relative Gain Array RGA Analysis
6 min
Beginner
Video
Theory
I cover how you can find the relative gain array from the steady state gain array, and interpret the results to determine which input to pair with which outp...
See More
Understanding Model Predictive Control, Part 4: Adaptive, Gain-Scheduled and...
6 min
Beginner
Video
Theory
This video explains the type of MPC controller you can use based on your plant model, constraints, and cost function. An optimization problem with these properties is a convex one, and you...
See More
State Space in Process Control
10 min
Beginner
Video
Theory
An overview on how we can derive a state space model from a given set of state variables and inputs, as well as an intro to deviation variables. This is part...
See More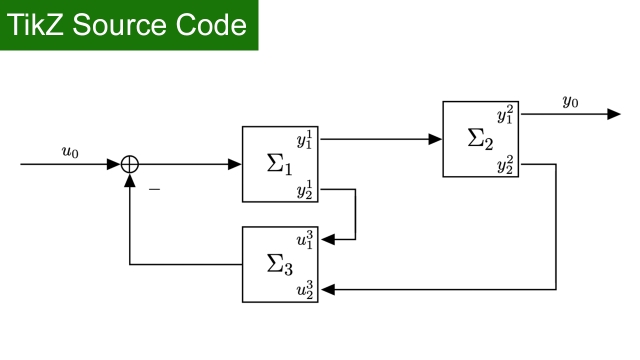
TikZ source Code: Interconnected MIMO Subsystems
Beginner
Source Code
Application
TikZ source Code: Interconnected MIMO Subsystems with different input and output dimensions
See More")
Introduction to the Fourier Transform (Part 2)
12 min
Beginner
Video
Theory
This video is the second part of the introduction to the Fourier Transform. I address an error that I made in the first video concerning the scaling term of the transform. I also try to...
See More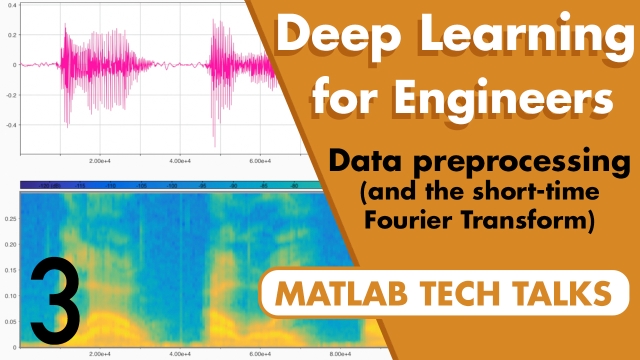
Data Preprocessing and the Short-Time Fourier Transform | Deep Learning for ...
16 min
Beginner
Video
Theory
Data in its raw form might not be ideal for training a network. There are some changes we can make to the data that are often desired or sometimes necessary in order to make training faster...
See More
Lecture 13: Stability and Routh Hurwitz criterion
31 min
Beginner
Video
Theory

Sketching Root Locus Part 2
16 min
Beginner
Video
Theory
This is the second part of how to sketch a root locus by hand. However instead of following the normal rules for sketching a locus that you'd see in a book, I decided to explain the rules...
See More
Lecture 15: Root Locus
53 min
Beginner
Video
Theory

Linearizing a Simulink Model Using the Linear Analysis Tool and ‘linmod’
55 min
Beginner
Video
Application
In this video we show how to linearize a non-linear Simulink model using numerical techniques. This approach is extremely powerful as it allows automatic ge...
See More
Derivation of Rodrigues’ Rotation Formula
43 min
Beginner
Video
Theory
In this video we explain and derive Rodrigues’ Rotation Formula. This functions describes how to rotate an arbitrary vector about another arbitrary axis of ...
See More
Lecture 1 Introduction to Automatic Control
29 min
Beginner
Video
Theory
")
Frequency domain – tutorial 13: sampling (theory of everything in signal pro...
25 min
Beginner
Video
Theory
In this video, we learn about sampling which enables us to travel from analog to digital world. The following materials are covered:1) why traveling to the ...
See More
Machine Learning - Andrew Ng, Stanford University
Beginner
Video
Theory
Machine learning is the science of getting computers to act without being explicitly programmed. In the past decade, machine learning has given us self-driving cars, practical speech...
See More
Linear Systems of Equations, Least Squares Regression, Pseudoinverse
11 min
Beginner
Video
Theory
This video describes how the SVD can be used to solve linear systems of equations. In particular, it is possible to solve nonsquare systems (overdetermined or underdetermined) via least...
See More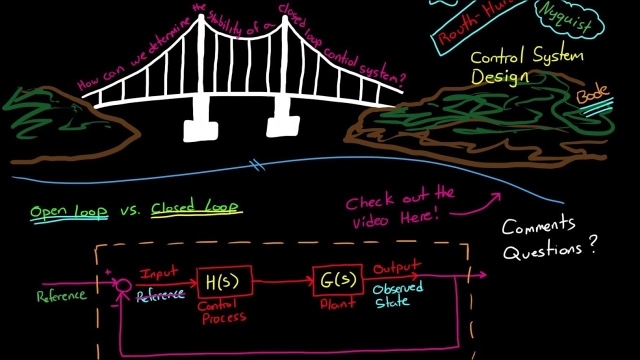
Stability of Closed Loop Control Systems
11 min
Beginner
Video
Theory
This video explains why we need design tools like the Routh-Hurwitz Criterion, Bode Plots, Nyquist Plots, and Root Locus. This is an introduction into the difficulties of determining the...
See More
Time domain - tutorial 9: convolution examples
25 min
Beginner
Video
Theory
In this video, we use a systematic approach to solve lots of examples on convolution. By the end of this lecture, you should be able to find convolution betw...
See More
Peter Ponders PID - Closed Loop Zeros
13 min
Beginner
Video
Theory
This video covers closed loop zeros, what causes zeros and the benefits and drawbacks of closed loop zeros.
See More![Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_306.jpg?itok=SzmzyZ6Z)
Reachability and Controllability with Cayley-Hamilton [Control Bootcamp]
10 min
Beginner
Video
Theory
Here we use the Cayley-Hamilton Theorem to show that the full state space is reachable if and only if the system is controllable.
See More
Peter Ponders PID- Motor position control
16 min
Beginner
Video
Theory

Transfer Functions in Simulink for Process Control
11 min
Beginner
Video
Theory
An introduction on deriving transfer functions from a linearized state space model via Laplace Transforms, and how we can input transfer functions into Simul...
See More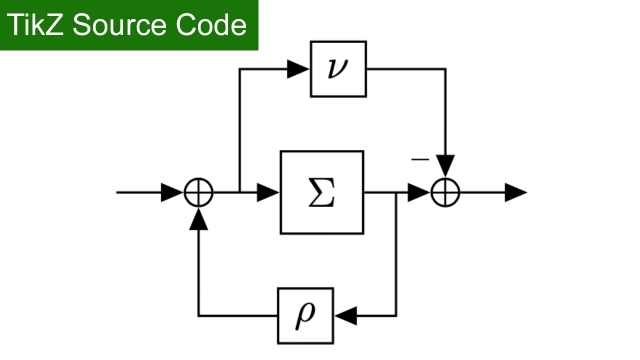
TikZ source Code: Both passivity indices applied
Beginner
Source Code
Application
TikZ source Code: Both passivity indices applied.
See More