


Standard HW Problem #2: Which is the real open loop transfer function?
13 min
Beginner
Video
Theory
In this video, we’ll go through another standard homework problem so you can see how you can apply many of the things you’re learning into a single problem. The question is, we have two...
See More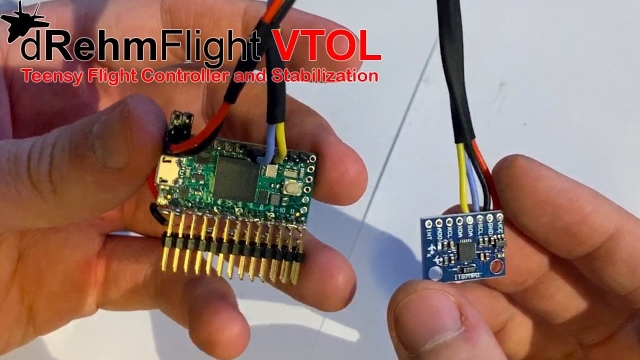
Building the Flight Controller Hardware - dRehmFlight VTOL
11 min
Beginner
Video
Application
This video will show you how to setup and solder the default recommended hardware setup for the dRehmFlight VTOL flight controller package. This hardware configuration will work with the...
See More
Resonant Frequency of a Dynamic System
29 min
Beginner
Video
Theory
In this video we discuss the resonant frequency of a dynamic system. We show how the resonant frequency, natural frequency, and damped natural frequency are...
See More
Posicast Control 4 - ( In English )
12 min
Beginner
Video
Theory
This video continues to explore the gantry crame control simulations in open-loop- The main focus is the half-cycle Posicast.
See More
Lecture 14: Routh Hurwitz Criterion
22 min
Beginner
Video
Theory

Solving the 1D Heat Equation
47 min
Beginner
Video
Theory
In this video we simplify the general heat equation to look at only a single spatial variable, thereby obtaining the 1D heat equation. We solving the result...
See More
Euler (Gimbal Lock) Explained
8 min
Beginner
Video
Theory
In this video we explore Euler Rotations, the most common method for orienting objects in 3d. It's by-product "gimbal lock" can cause headaches for animators because the animated motion can...
See More
Laplace domain – tutorial 4: Laplace transform examples
20 min
Beginner
Video
Theory
In this video, we solve lots of examples to practice how to quickly find Laplace transform using the table of pairs & properties and five golden rules on ROC...
See More
Control Bootcamp: Example Frequency Response (Bode Plot) for Spring-Mass-Da...
18 min
Beginner
Video
Theory
This video shows how to compute and interpret the Bode plot for a simple spring-mass-damper system.
See More
Control Bootcamp: Loop Shaping Example for Cruise Control
12 min
Beginner
Video
Theory
This video demonstrates loop shaping on the cruise control model.
See More
IMC PID Design of a Second Order Process
8 min
Beginner
Video
Theory
IMC PID Design of a Second Order Process
See More
Peter Ponders PID - LQR Optimizing Two Outputs
16 min
Beginner
Video
Theory

Frequency domain – tutorial 4: Gibbs phenomenon
4 min
Beginner
Video
Theory
In this video, we quickly review the Gibbs phenomenon which involves two facts:1) Fourier sums overshoot at a jump discontinuity2) overshoot does not disapp...
See More
Understanding Model Predictive Control, Part 2: What is MPC?
6 min
Beginner
Video
Theory
Learn how model predictive control (MPC) works. Using a simple car example, this video provides insight into an MPC controller’s strategy for finding the optimal steering wheel angle to...
See More
Second Order Dynamics
3 min
Beginner
Video
Theory
A crash course overview on second order dynamics in the frequency domain, what the key parameters are, and why they matter.
See More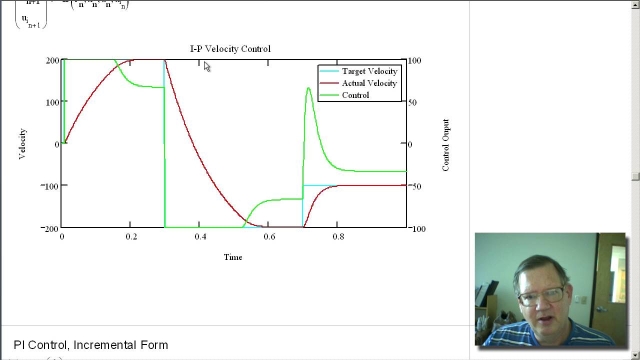
Peter Ponders PID - Controlling a non-integrating single pole system. Part 3...
9 min
Beginner
Video
Theory
Part 3 uses PI control which is the only practical means of control a non-integrating single pole system.http://deltamotion.comhttp://forum.deltamotion.com
See More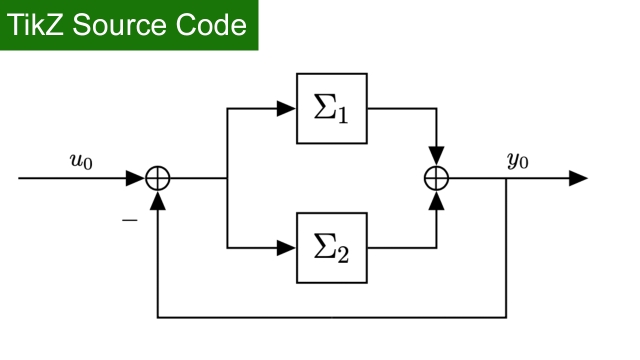
TikZ source Code: Feedback systems
Beginner
Source Code
Application
TikZ source Code: Feedback systems
See More![Fourier Series and Gibbs Phenomena [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_363.jpg?itok=YEl5oqig "Fourier Series and Gibbs Phenomena [Matlab]")
Fourier Series and Gibbs Phenomena [Matlab]
7 min
Beginner
Video
Application
This video will describe how to compute the Fourier Series in Matlab and Gibbs Phenomena that appear for discontinuous functions.
See More")
Principal Component Analysis (PCA)
13 min
Beginner
Video
Theory
Principal component analysis (PCA) is a workhorse algorithm in statistics, where dominant correlation patterns are extracted from high-dimensional data.
See More
Trimming a Model of a Dynamic System Using Numerical Optimization
60 min
Beginner
Video
Theory
In this video we show how to find a trim point of a dynamic system using numerical optimization techniques. We generate a cost function that corresponds to ...
See More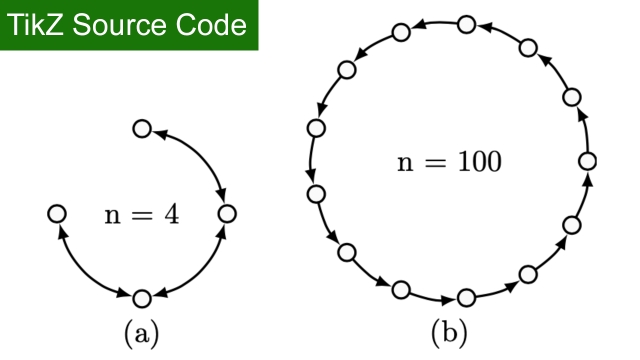
TikZ source Code: Simulation Graph
Beginner
Source Code
Application
TikZ source Code: Simulation Graph
See More
Root Locus Plot: Common Questions and Answers
17 min
Beginner
Video
Theory
In this video I go through some of the common questions I've received on my other root locus videos. 1) Why do we call the poles of a system the roots?2) How do I plot the damping ratio...
See More
The Laplace Transform
115 min
Beginner
Video
Theory
In this video we show how to perform the Laplace transform on a signal in the time domain to obtain its equivalent representation in the Laplace domain. Top...
See More
Lecture 18: PI and Lag Compensator Design using Root Locus
41 min
Beginner
Video
Theory
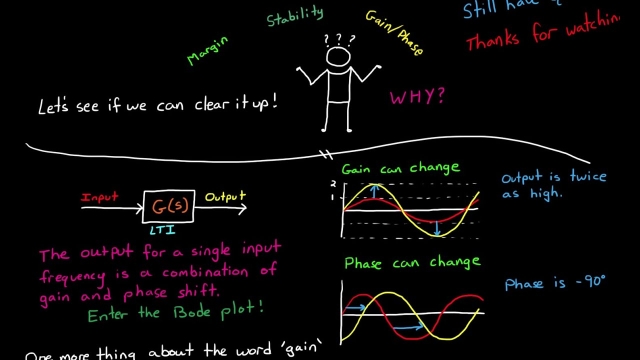
Gain and Phase Margins Explained!
13 min
Beginner
Video
Theory
In this video I explain gain and phase margins. If you are confused by this topic I hope this video will help tie all of the concepts together that go into understanding what gain and phase...
See More