


Time domain - tutorial 11: system properties from impulse response
13 min
Beginner
Video
Theory
In this video, we learn how to find system properties from the impulse response. Specifically, memoryless, causal, stable and invertible systems will be ful...
See More
Lecture 1 Introduction to Automatic Control
29 min
Beginner
Video
Theory

Lecture 5: Block Diagram Reduction
46 min
Beginner
Video
Theory

Time domain - tutorial 2: signal representation
2 min
Beginner
Video
Theory
In this video, we review how to represent information as a signal. The information can be anything such as voice (1D) or an image (2D) or even a video (3D). ...
See More
Linear Systems of Equations, Least Squares Regression, Pseudoinverse
11 min
Beginner
Video
Theory
This video describes how the SVD can be used to solve linear systems of equations. In particular, it is possible to solve nonsquare systems (overdetermined or underdetermined) via least...
See More
Lecture 3: Electrical and Mechanical System Transfer Functions
52 min
Beginner
Video
Theory

Transfer Functions in Simulink for Process Control
11 min
Beginner
Video
Theory
An introduction on deriving transfer functions from a linearized state space model via Laplace Transforms, and how we can input transfer functions into Simul...
See More
Introductory course on aerial robotics, University of Pennsylvania
Beginner
Video
Theory
This course exposes you to the mechanics, design, control, and planning of robotic flight in 3 dimensional environments for micro-aerial vehicles, with an emphasis on quadrotors.
See More
Direct Design Example for PID Controller
7 min
Beginner
Video
Theory
I go through an example problem of how we can use Direct Design (also called Direct Synthesis) to determine the tuning parameters for a PID controller, given...
See More
State Space to Transfer Function
48 min
Beginner
Video
Theory
In this video we show how to transform a linear state space representation of a dynamic system to an equivalent transfer function representation. We will de...
See More![Controllability and the Discrete-Time Impulse Response [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_302.jpg?itok=xjXmM9_U)
Controllability and the Discrete-Time Impulse Response [Control Bootcamp]
5 min
Beginner
Video
Theory
This lecture derives the impulse response for a discrete-time system and relates this to the controllability matrix.
See More
Humans, Robots, and Non-Prehensile Manipulation
12 min
Beginner
Video
Theory
This is a fun video that was inspired by a presentation I saw at the 2015 International Conference on Robotics and Automation (ICRA). I wanted to see if humans could duplicate the...
See More
Peter Ponders PID - Feed Forward Theory and Calculations
6 min
Beginner
Video
Theory

Using a Homogeneous Transformation Matrix to Combine Rotation and Translatio...
63 min
Beginner
Video
Theory
In this video we discuss how to properly deal with coordinate frames that are both rotated and translated from one another. We develop a homogeneous transfo...
See More
Resonant Frequency of a Dynamic System
29 min
Beginner
Video
Theory
In this video we discuss the resonant frequency of a dynamic system. We show how the resonant frequency, natural frequency, and damped natural frequency are...
See More
Control Bootcamp: Sensitivity and Complementary Sensitivity
11 min
Beginner
Video
Theory
Here we explore the sensitivity and complementary sensitivity functions, which are critical in understanding robustness and performance.
See More
Designing a PID Controller Using the Ziegler-Nichols Method
33 min
Beginner
Video
Theory
In this video we discuss how to use the Ziegler-Nichols method to choose PID controller gains. In addition to discussing the method and providing a Matlab i...
See More
Control Systems Lectures - Closed Loop Control
9 min
Beginner
Video
Theory
This lecture discusses the differences between open loop and closed loop control.
See More
Solving the 1D Heat Equation
47 min
Beginner
Video
Theory
In this video we simplify the general heat equation to look at only a single spatial variable, thereby obtaining the 1D heat equation. We solving the result...
See More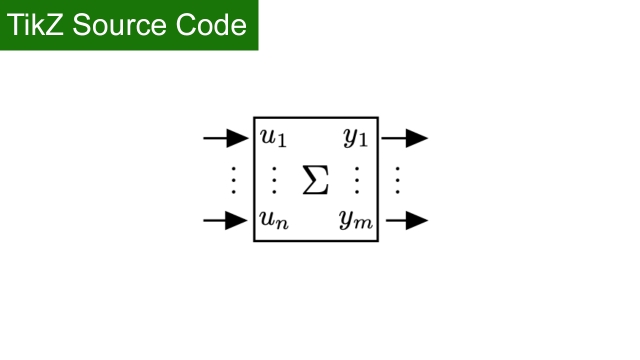
TikZ source Code: A single MIMO system
Beginner
Source Code
Application
TikZ source Code: A single MIMO system
See More
Solving the Heat Equation with the Fourier Transform
11 min
Beginner
Video
Theory
This video describes how the Fourier Transform can be used to solve the heat equation. In fact, the Fourier transform is a change of coordinates into the eigenvector coordinates for the...
See More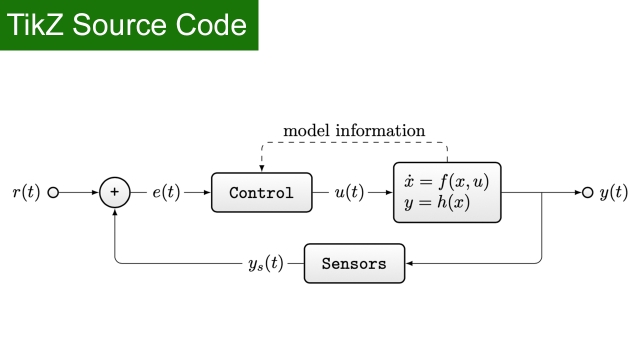
TikZ source Code: Feedback system
Beginner
Source Code
Application
TikZ source Code: Feedback system
See More
The Fourier Transform and Convolution Integrals
10 min
Beginner
Video
Theory
This video describes how the Fourier Transform maps the convolution integral of two functions to the product of their respective Fourier Transforms.
See More
Laplace domain – tutorial 4: Laplace transform examples
20 min
Beginner
Video
Theory
In this video, we solve lots of examples to practice how to quickly find Laplace transform using the table of pairs & properties and five golden rules on ROC...
See More
Lecture 6: Signal Flow Graphs and Mason's Gain Rule
47 min
Beginner
Video
Theory