
15 min
Intermediate
Article / Blog
Application
Link to External Site
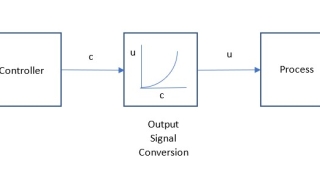
If the process gain makes large changes over the operating range, then tuning PID (or other linear) controllers is difficult. If tuned for one region, the controller is undesirably sluggish or aggressive in another.
However, where the static nonlinearity can be characterized by the controller output, and the process dynamic response remains relatively unaffected, output characterization is the recommended solution to linearize the loop response, to create a constant loop gain, and solve the tuning problem.
Radioactivity
0
