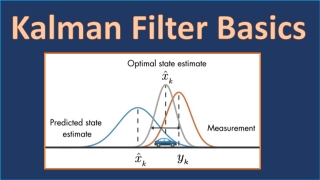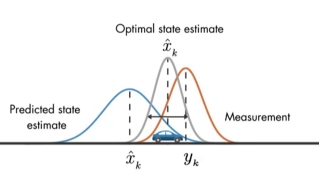
Watch this video for an explanation of how Kalman filters work. Kalman filters combine two sources of information, the predicted states and noisy measurements, to produce optimal, unbiased estimates of system states. The filter is optimal in the sense that it minimizes the variance in the estimated states.
The example introduces a linear single-state system where the measured output is the same as the state (the car’s position). The video explains the process and measurement noise that affect the system. You’ll learn that the Kalman filter calculates an unbiased state estimate with minimum variance in the presence of uncertain measurements. The video shows the working principles behind Kalman filters by illustrating probability density functions.