
Tuning a control loop is the adjustment of its control parameters (e.g. in the case of a PID controller, it proportional band/gain, integral gain/reset, derivative gain/rate) to the optimum values for the desired control response.
Topic
Tuning
This topic includes the following resources and journeys:
Filters
Type
Experience
Scope
2 items
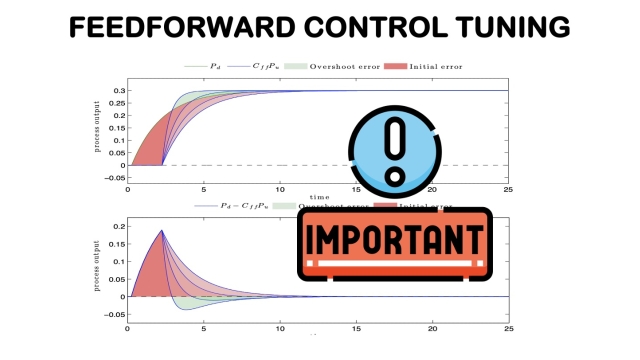
Advances in feedforward control for measurable disturbances
35 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More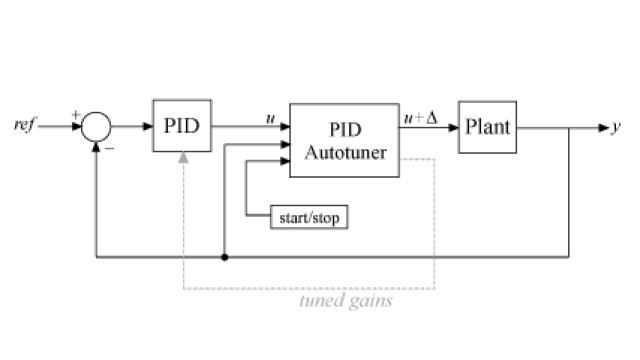
Online Tuning using Simulink’s Closed-Loop PID Autotuner Block
30 min
Intermediate
Article / Blog
Application
Learn how to conduct an online tuning of a PI-speed controller using the MATLAB/Simulink Closed-Loop PID Autotuner Block. Tuned controller is validated on a Quanser QLabs Virtual QUBE-Servo...
See More