
In control systems, sliding mode control (SMC) is a nonlinear control method that alters the dynamics of a nonlinear system by applying a discontinuous control signal (or more rigorously, a set-valued control signal) that forces the system to "slide" along a cross-section of the system's normal behavior. The state-feedback control law is not a continuous function of time. Instead, it can switch from one continuous structure to another based on the current position in the state space. Hence, sliding mode control is a variable structure control method. The multiple control structures are designed so that trajectories always move toward an adjacent region with a different control structure, and so the ultimate trajectory will not exist entirely within one control structure. Instead, it will slide along the boundaries of the control structures. The motion of the system as it slides along these boundaries is called a sliding mode and the geometrical locus consisting of the boundaries is called the sliding (hyper)surface. In the context of modern control theory, any variable structure system, like a system under SMC, may be viewed as a special case of a hybrid dynamical system as the system both flows through a continuous state space but also moves through different discrete control modes.
Topic
Sliding Mode Control
This topic includes the following resources and journeys:
Filters
Type
Experience
Scope
8 items
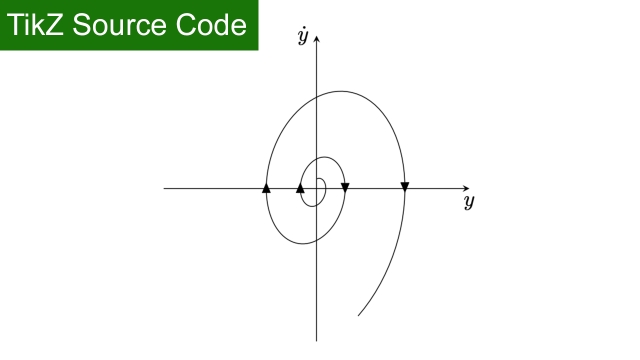
TikZ source Code: Sliding Mode Control Example System 2
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 2
See More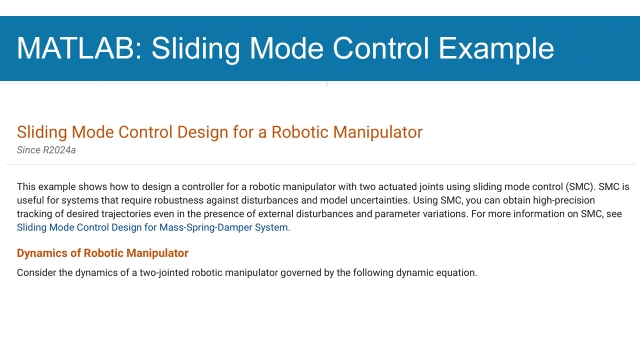
Sliding Mode Control Design for a Robotic Manipulator
Intermediate
Example
Application
This MATLAB/Simulink example shows how to design a controller for a robotic manipulator with two actuated joints using sliding mode control (SMC). SMC is useful for systems that require...
See More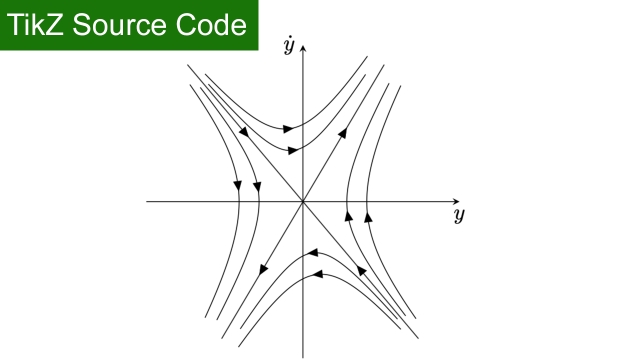
TikZ source Code: Sliding Mode Control Example System 1
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 1
See More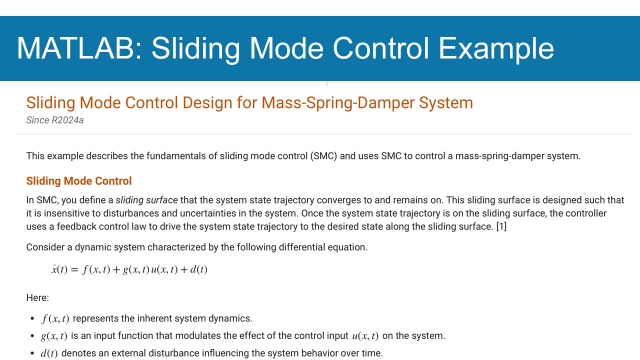
Sliding Mode Control Design for Mass-Spring-Damper System
Intermediate
Example
Application
This MATLAB/Simulink example describes the fundamentals of sliding mode control (SMC) and uses SMC to control a mass-spring-damper system.
See More with Smith Predictor")
SOPDT Sliding Mode Control ( SMC ) with Smith Predictor
6 min
Beginner
Video
Theory
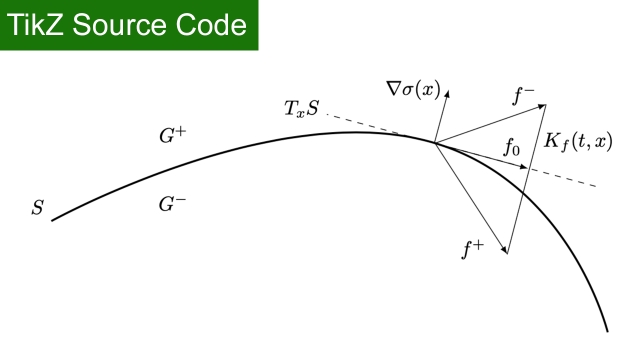
TikZ source Code: Switching Smooth Filippov
Beginner
Source Code
Application
TikZ source Code: Switching Smooth Filippov
See More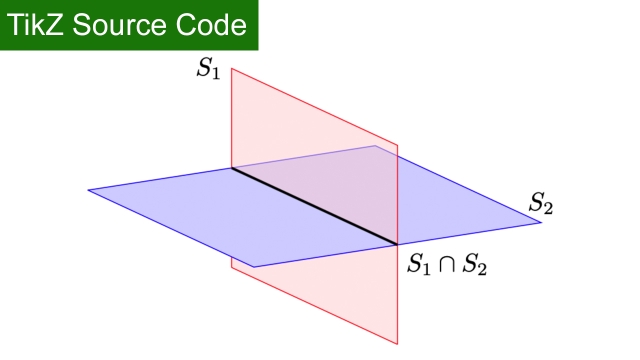
TikZ source Code: Switching Manifold
Beginner
Source Code
Application
TikZ source Code: Switching Manifold
See More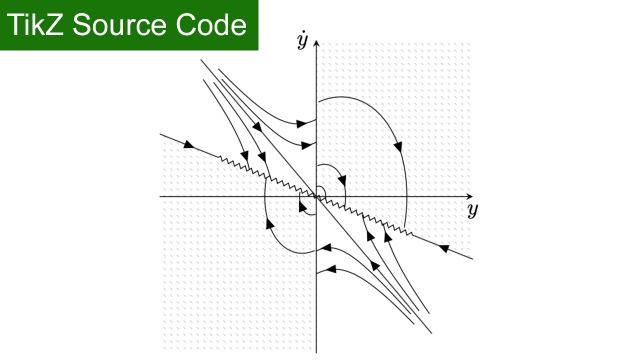
TikZ source Code: Sliding Mode Control Example
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example
See More