

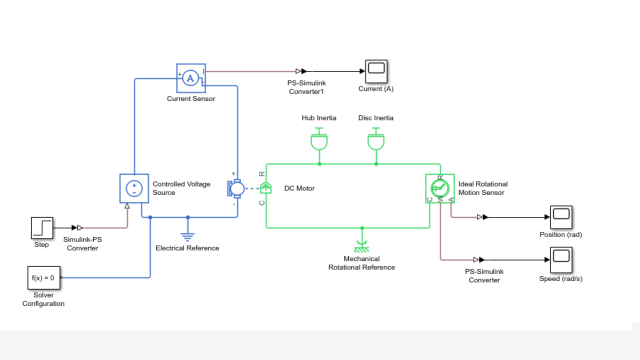
Using Simscape™ to Model a Quanser QUBE-Servo 2 with Friction
15 min
Intermediate
Article / Blog
Theory
Modelling a DC servomotor is one of the common examples used in control system textbooks and courses. Given that so many systems use DC motors, e.g. robot manipulator arms, it’s an important...
See More
My Sole Advise to Data Scientists on Coursera & Quora
Beginner
Article / Blog
Theory
This blog post by Tarry Singh answers questions including "How do I get started in the field on Machine Learning, Deep Learning or Artificial Intelligence" and "How do I advance from the...
See More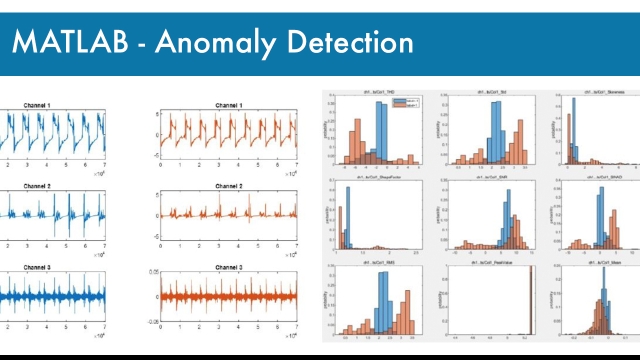
MATLAB Discovery Page - Anomaly Detection
Beginner
Article / Blog
Theory
Anomaly detection is the process of identifying events or patterns that differ from expected behavior. Anomaly detection can range from simple outlier detection to complex machine learning...
See More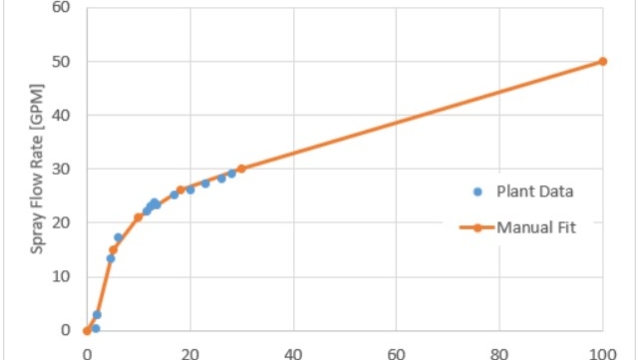
Output Characterization to Linearize a Loop - Control valve application
20 min
Intermediate
Article / Blog
Application
This application paper explains how a control valve created nonlinearity in a loop and how output characterization solved the problem
See More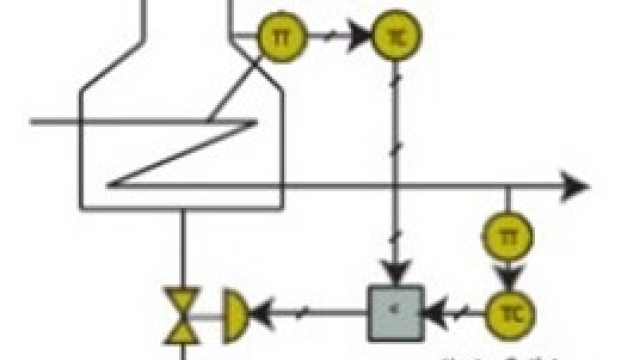
Override and Reset Feedback
15 min
Intermediate
Article / Blog
Application
Override controllers are for safety or switching to auxiliary variables. The non-selected controller needs to prevent becoming wound up.
See More
Computer Aids for Chemical Engineering
Beginner
Article / Blog
Theory
A curated list of resources for Chemical Engineering students. The resources include syllabi, schedules, course notes, textbooks, screencasts, software, hardware, and other useful links.
See More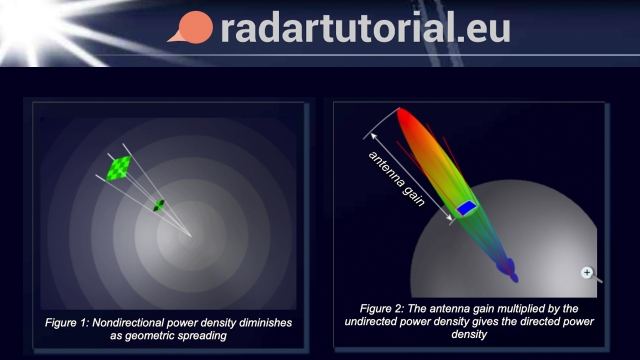
The Radar Range Equation - radartutorial.eu
Beginner
Article / Blog
Theory
This article describes the radar range equation. The radar range equation represents the physical dependences of the transmit power, which is the wave propagation up to the receiving of the...
See More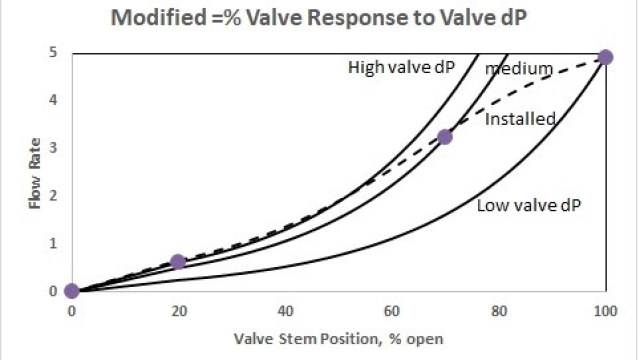
Understanding Valve Flow Characteristics
20 min
Intermediate
Article / Blog
Application
The response of flow rate through a control valve depends on the friction losses in the piping in which it is installed as well as the controller signal. The installed characteristic (a...
See More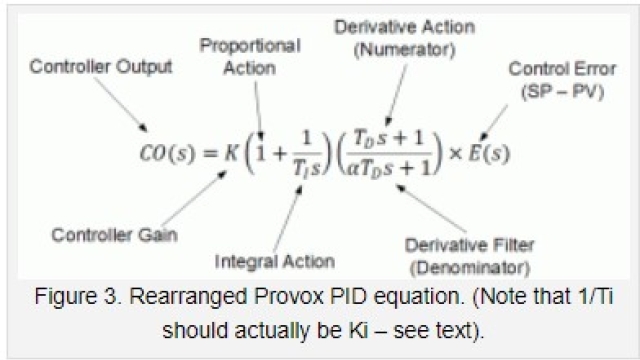
Decoding a Laplace Representation of a Controller
20 min
Intermediate
Article / Blog
Application
A how to relate the Laplace notation to the PID controller variation and features
See More
The Linear Quadratic Regulator (LQR)
Intermediate
Article / Blog
Theory
Lecture notes for ECE717 on LQR control by Laurent Lessard. There is a section that shows how the Algebraic Riccati Equation is part of the LQR solution by "completing the square".
See More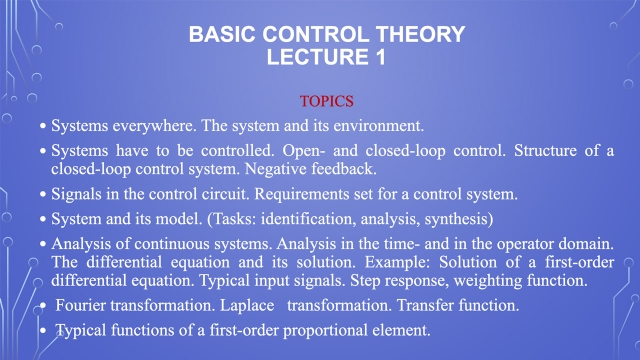
Basic course of control theory (Hungarian and English)
Beginner
Article / Blog
Theory
The basic course of control theory is taught in the 3rd year for the students specialized in information technology at the Faculty of Electrical Engineering and Informatics of the Budapest...
See More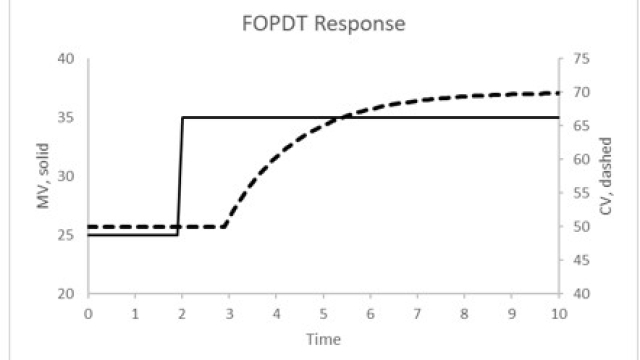
Use First-Principles Modeling to Get FOPDT Coefficient Values
30 min
Intermediate
Article / Blog
Application
Conventionally, we obtain model coefficient values by open-loop step-testing of the process; but this creates undesirable process upsets, and only reveals the local process behavior. This...
See More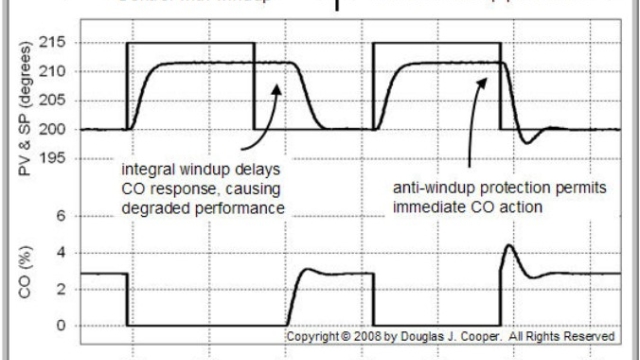
Integral Wind-Up and Solution
Intermediate
Article / Blog
Application
What is integral wind-up and how velocity mode solves it.
See More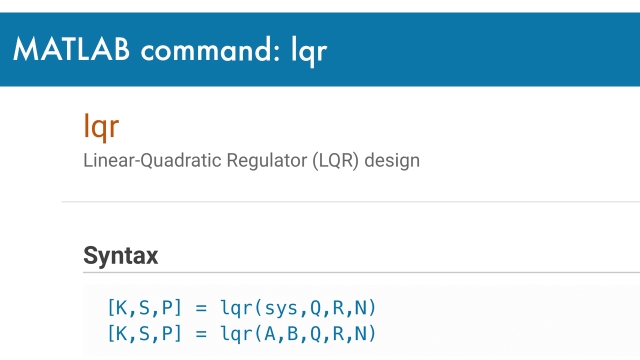
MATLAB Command: lqr
Intermediate
Article / Blog
Application
MATLAB command documentation for the Linear-Quadratic Regulator (lqr) function.
See More
Adaptive Control (Part I) — Hypersonics and the MIT Rule
Intermediate
Article / Blog
Theory
This blog post introduces the algorithm that ruled the adaptive flight control system of the first manned hypersonic aircraft, the North American X-15.
See More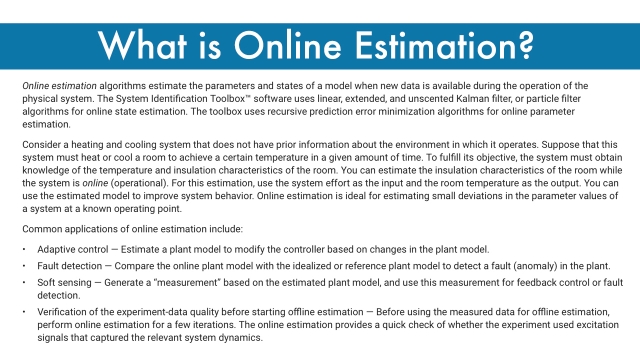
What Is Online Estimation?
Beginner
Article / Blog
Theory
This Mathworks document describes online estimation. Online estimation algorithms estimate the parameters and states of a model when new data is available during the operation of the...
See More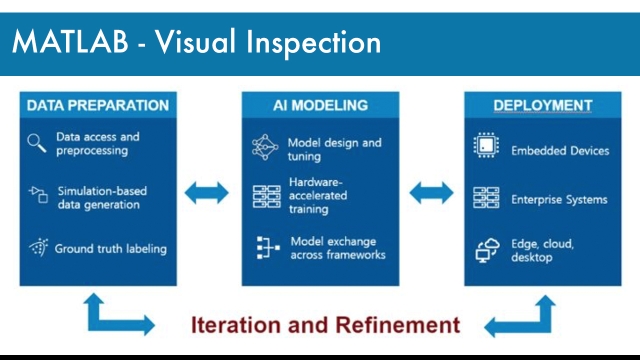
MATLAB Discovery Page - Visual Inspection
Beginner
Article / Blog
Theory
Visual inspection is the image-based inspection of parts where a camera scans the part under test for both failures and quality defects. Automated inspection and defect detection are...
See More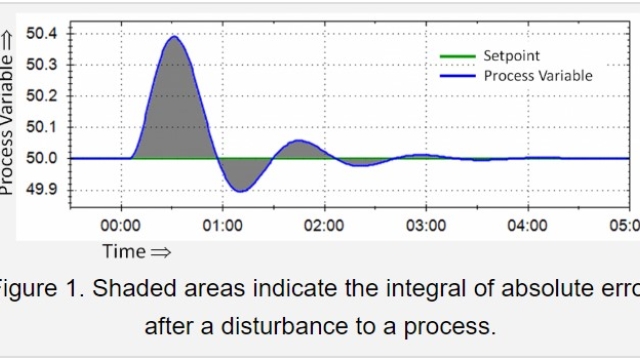
Min IAE Tuning
15 min
Intermediate
Article / Blog
Application
Procedure and Commentary on tuning for minimum Integral of the Absolute Error
See More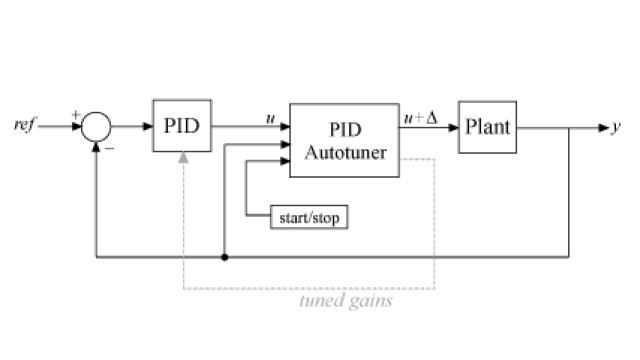
Online Tuning using Simulink’s Closed-Loop PID Autotuner Block
30 min
Intermediate
Article / Blog
Application
Learn how to conduct an online tuning of a PI-speed controller using the MATLAB/Simulink Closed-Loop PID Autotuner Block. Tuned controller is validated on a Quanser QLabs Virtual QUBE-Servo...
See More
Process Control is Inventory Control
10 min
Beginner
Article / Blog
Application
You change the inventory of heat to change temperature. You change the inventory of material to change level. Understanding how the inventory relates to the controlled variable is...
See More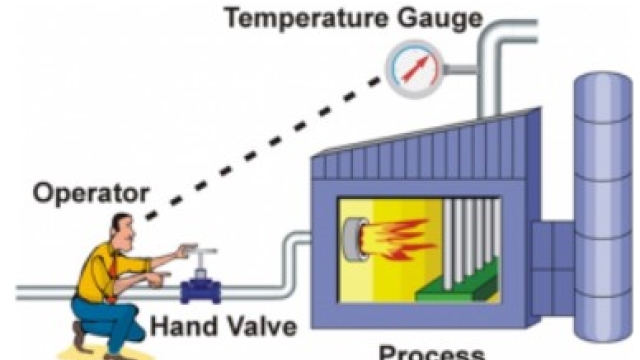
PID Explained
20 min
Beginner
Article / Blog
Theory
A qualitative explanation of P, I, & D actions using graphs.
See More
Lectures on Modelling and Control of Dynamic Systems (French)
Beginner
Article / Blog
Theory
Lectures on Modelling and Control of Dynamic Systems from Patrick Lanusse of Bordeaux INP, France.
See More
MATLAB Command: goodnessOfFit
Intermediate
Article / Blog
Application
Goodness of fit between test and reference data for analysis and validation of identified models
See More
PID Controller Variations
20 min
Intermediate
Article / Blog
Application
It is important to understand the variations on the PID algorithm when tuning and when choosing a version that is consistent within your use context. Unfortunately, there are many names for...
See More
Bumpless Transfer and Tuning
15 min
Intermediate
Article / Blog
Application
Switching from MAN to AUTO mode or LOCAL to CASCADE or changing the controller integral time should not cause a change in the controller output, a bump. But a primitive coding of the PID...
See More