

Control Valve Problems
20 min
Intermediate
Article / Blog
Application
Control valve problems can severely affect control loop performance and, unless eliminated, they can make controller tuning a challenging (sometimes impossible) task. Some problems are quite...
See More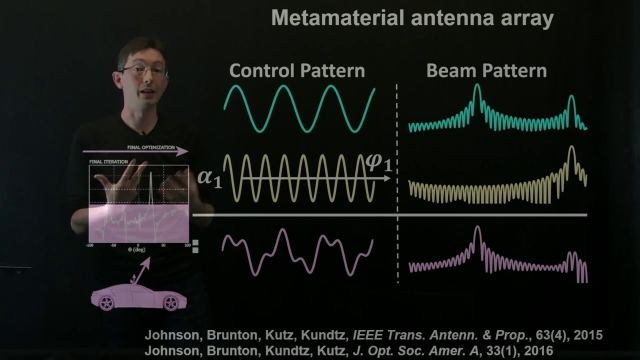
Extremum Seeking Control Applications
19 min
Beginner
Video
Application
This lecture highlights some of the many applications of extremum-seeking control (ESC) performed by Steve Brunton and collaborators.
See More
Linear Model Identification Basics
Intermediate
Article / Blog
Application
This is a curated list of Mathworks products, examples, and topics that cover identifying linear models, selecting suitable model structures, constructing and modifying model object...
See More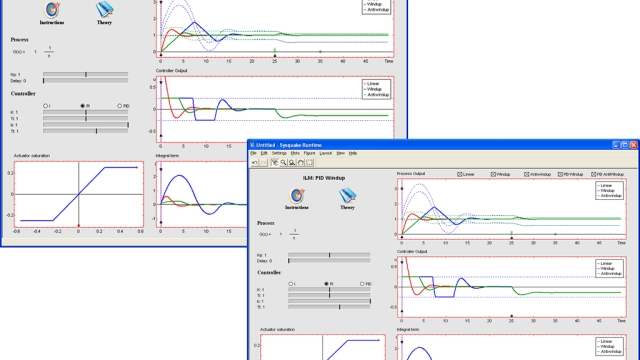
Interactive Tool about control signal saturation (windup) with PID control
Intermediate
App
Application
The purpose of this module is to give a familiarity with the phenomenon of integral windup and a method for avoiding it. The module shows process outputs and control signals for unlimited...
See More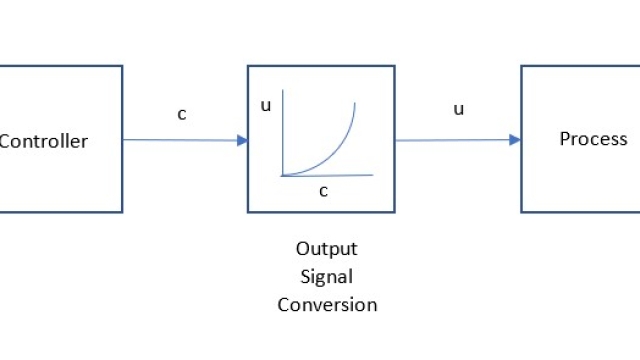
Nonlinear Control Output Signal Characterization
15 min
Intermediate
Article / Blog
Application
If the process gain makes large changes over the operating range, then tuning PID (or other linear) controllers is difficult. If tuned for one region, the controller is undesirably sluggish...
See More
Bumpless Transfer and Tuning
15 min
Intermediate
Article / Blog
Application
Switching from MAN to AUTO mode or LOCAL to CASCADE or changing the controller integral time should not cause a change in the controller output, a bump. But a primitive coding of the PID...
See More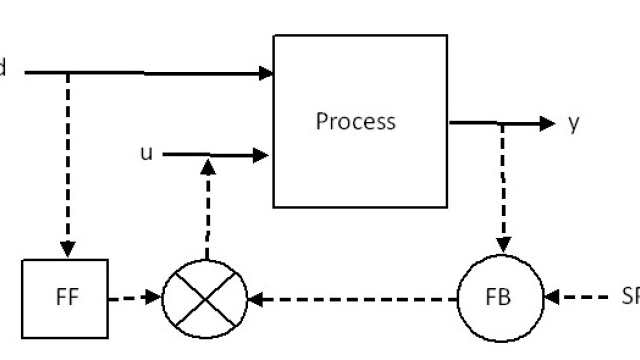
Feedforward Control
15 min
Intermediate
Article / Blog
Application
When and how to use Feedforward Control
See More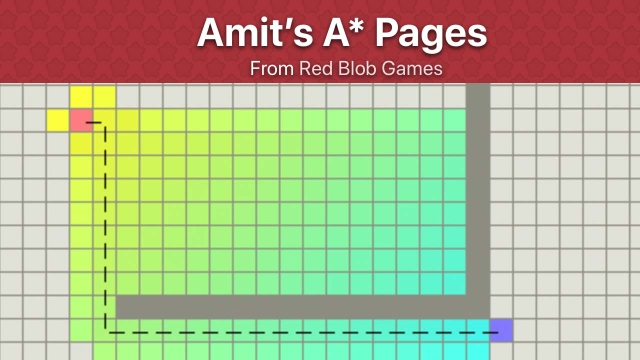
Pathfinding with A*
60 min
Beginner
Article / Blog
Application
An interactive visual explanation of the A* pathfinding algorithm. This resource uses motivating examples from computer games.
See More
MATLAB Online
Beginner
App
Application
Use MATLAB and Simulink through your web browser. No downloads or installations. MATLAB® Online™ provides access to MATLAB and Simulink from any standard web browser wherever you have...
See More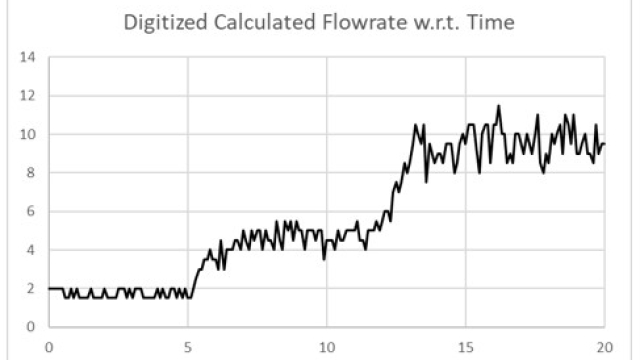
Measurements, Transmission Signals, and Issues
45 min
Intermediate
Article / Blog
Application
This is an introduction to scaled information transmission signals (for example 4-20 mA, 3-15 psig, etc.), the actual sensed signals (like using orifice dP to infer flow rate, or temperature...
See More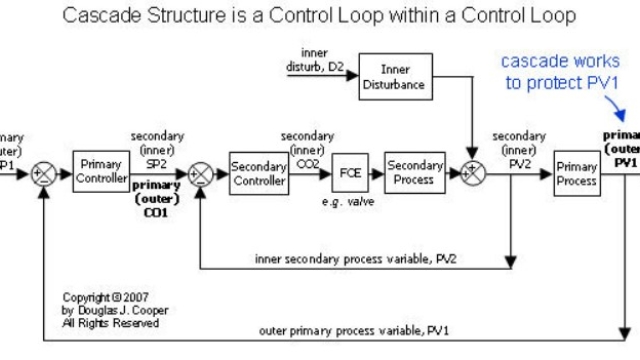
Cascade Control 2
Intermediate
Article / Blog
Application
An Implementation Recipe for Cascade Control
See More
PID Controller Implementation in Software
20 min
Intermediate
Video
Application
How to implement a PID controller in software using C, discussing theory and practical considerations. Demonstration of PID controller code using a custom flight simulator.
See More
Bridging the Gap: Using Real World Problems to Unveil Deep Control Principle...
52 min
Intermediate
Video
Application
This is a plenary lecture given at the 2020 IEEE Conference on Control Systems Technology, Montreal, Canada, August 24-26, 2020. There is no paper, but this is the video of the talk.
See More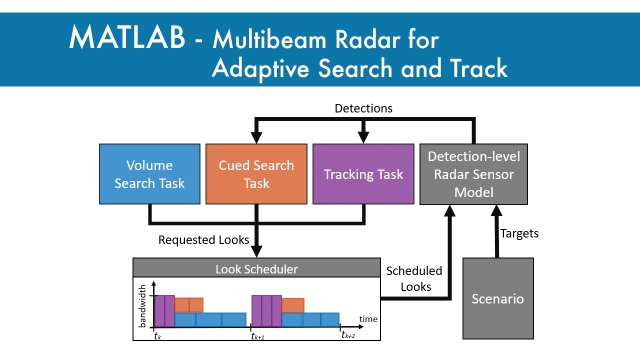
Multibeam Radar for Adaptive Search and Track
Intermediate
Example
Application
This MATLAB example shows how to use radarDataGenerator for a closed-loop simulation of a multifunction phased array radar (MPAR). The example starts by defining MPAR system parameters and...
See More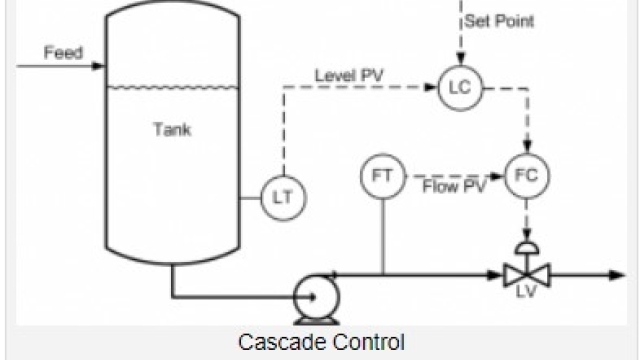
Cascade Control
30 min
Intermediate
Article / Blog
Application
What is Cascade Control and why use it?
See More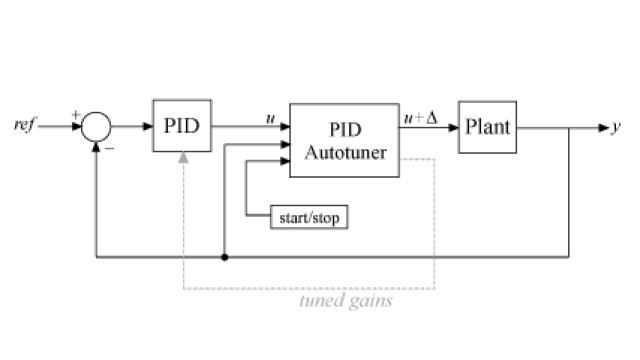
Online Tuning using Simulink’s Closed-Loop PID Autotuner Block
30 min
Intermediate
Article / Blog
Application
Learn how to conduct an online tuning of a PI-speed controller using the MATLAB/Simulink Closed-Loop PID Autotuner Block. Tuned controller is validated on a Quanser QLabs Virtual QUBE-Servo...
See More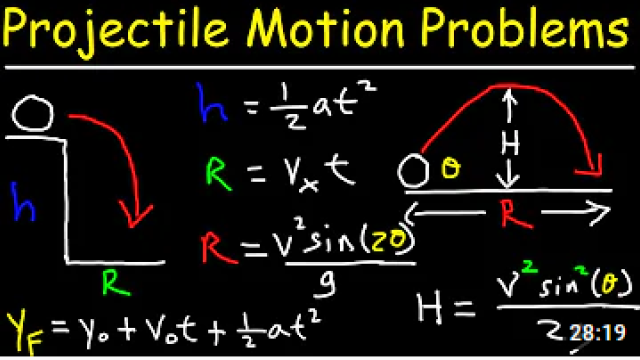
Projectile Motion Practice Problems
28 min
Intermediate
Video
Application
In this video, practice along questions on an important topic of Kinematics i.e Projectile Motion. Practicing would help you remember the concepts and also understand them better.
See More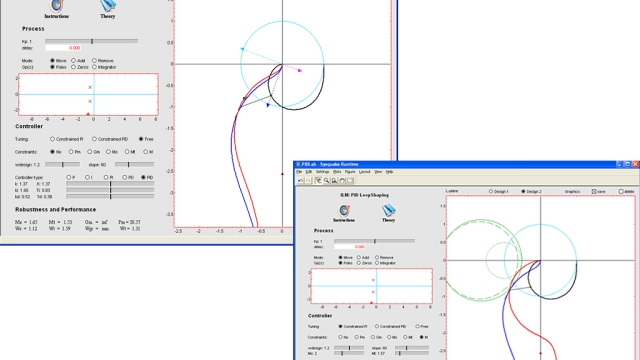
Interactive Tool for Loop Shaping understanding based on PID control
Intermediate
App
Application
Loop shaping is a design method where it is attempted to choose a controller such that the loop transfer function obtains the desired shape. In this module the loop transfer function is...
See More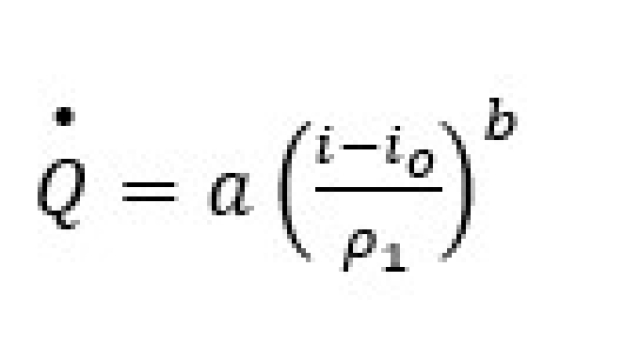
Orifice Calibration
15 min
Intermediate
Article / Blog
Application
The ISO method for orifice design and calibration is grounded in the ideal square-root relation between pressure drop and flow rate, specifies the in-pipe structure for an orifice, and...
See More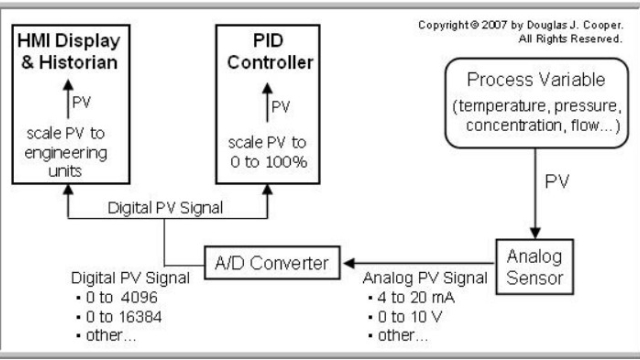
Scaled Transmission Signals, Engineering Units, and Conversions
30 min
Intermediate
Article / Blog
Application
Information is transmitted in scaled signals (4-20 mA, 3-15 psig, 0-100%, digital counts), which are also deviations from some reference vales (such as psi gage is to psia). But process...
See More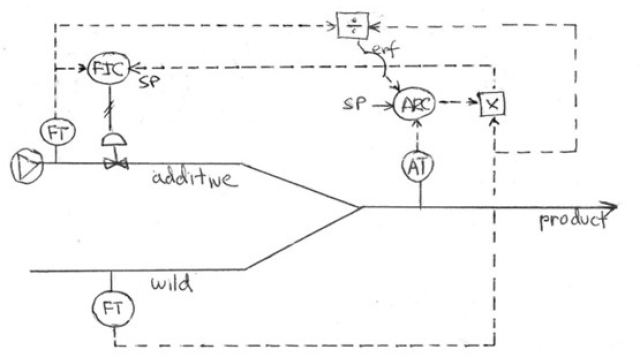
Ratio Control and Scaled Signal Calculations
15 min
Intermediate
Article / Blog
Application
When and how to use Ratio Control and use Scaled Signals
See More
Interpreting Lines on PFDs and P&IDs
20 min
Intermediate
Article / Blog
Application
Lines on a process flow diagram (PFD) indicate material flow. In contrast, on a piping and instrument diagram (P&ID), the control overlay for the PFD, the lines represent information flow. ...
See More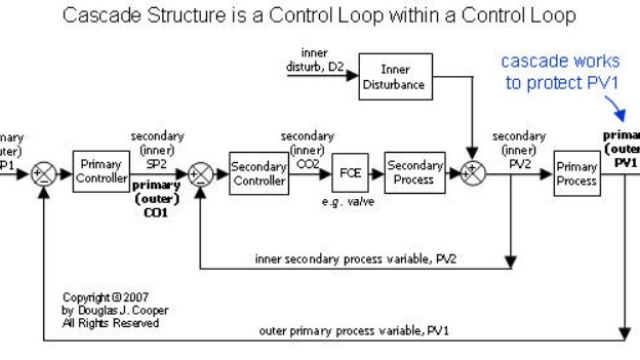

Real-Time Software Implementation of Analog Filters
14 min
Intermediate
Video
Application
Modelling analog filters, discretisation, and implementation of the digitally-equivalent filters on a real-time, embedded system (STM32). Includes theory, DSP, firmware, and results.
See More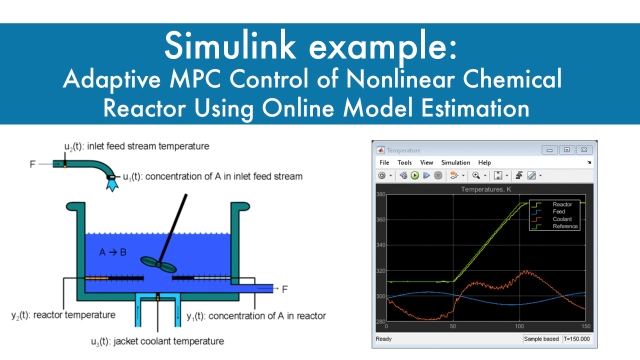
Simulink example: Adaptive MPC Control of Nonlinear Chemical Reactor Using O...
Intermediate
Project
Application
This example shows how to use an Adaptive MPC controller to control a nonlinear continuous stirred tank reactor (CSTR) as it transitions from low conversion rate to high conversion rate.
A...
See More